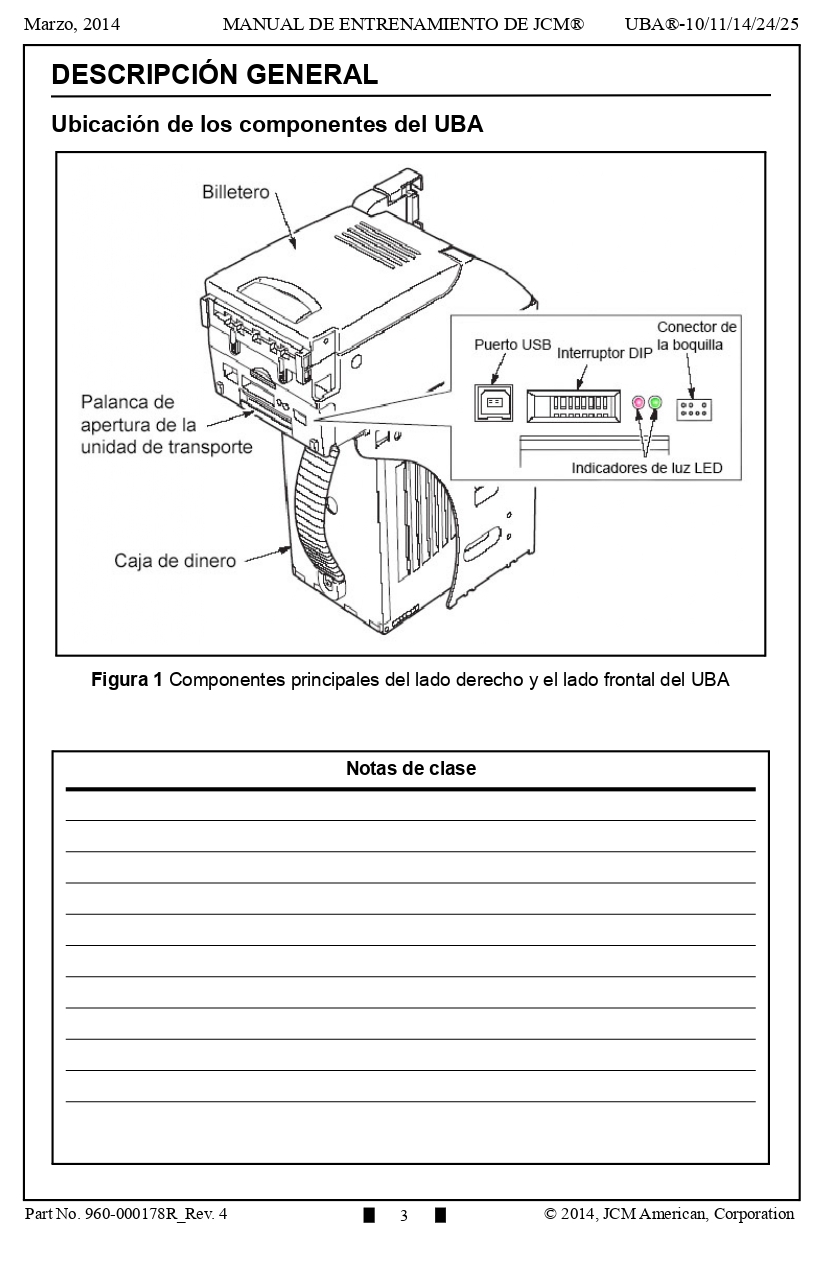















Un billetero es una de las tres partes importantes de una máquina de Casino o Vending, pues es el puerto de entrada de dinero al equipo y es este ( el billetero ) el encargado de verificar que los billetes sean válidos, así también como dar el cambio o dinero excedente en máquinas expendedoras según sea el caso.
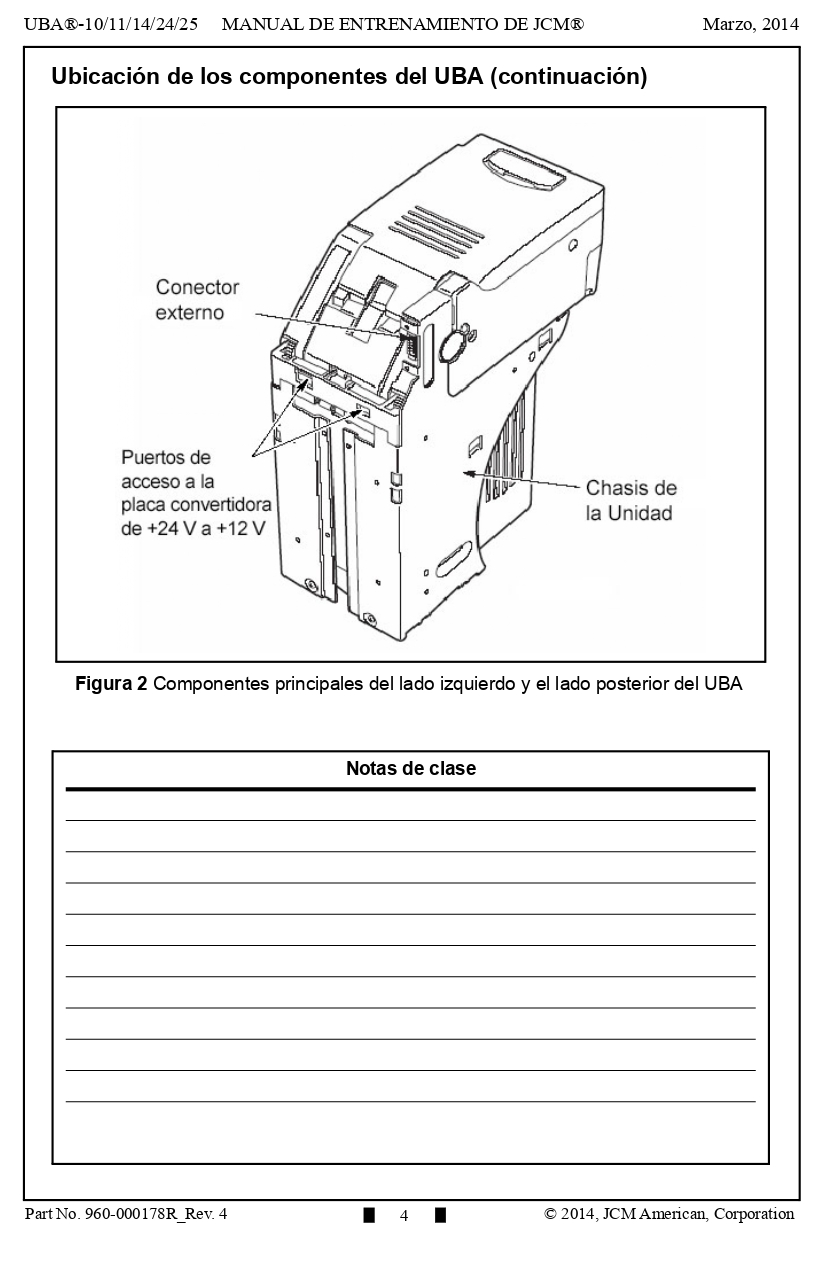
El billetero JCM UBA-10 es ampliamente conocido por su versatilidad y larga duración, veíamos en videos pasados como reparar y lavar un billetero JCM en tres entregas donde explicamos el paso a paso para desbaratarlo y cuales piezas se pueden lavar con agua.
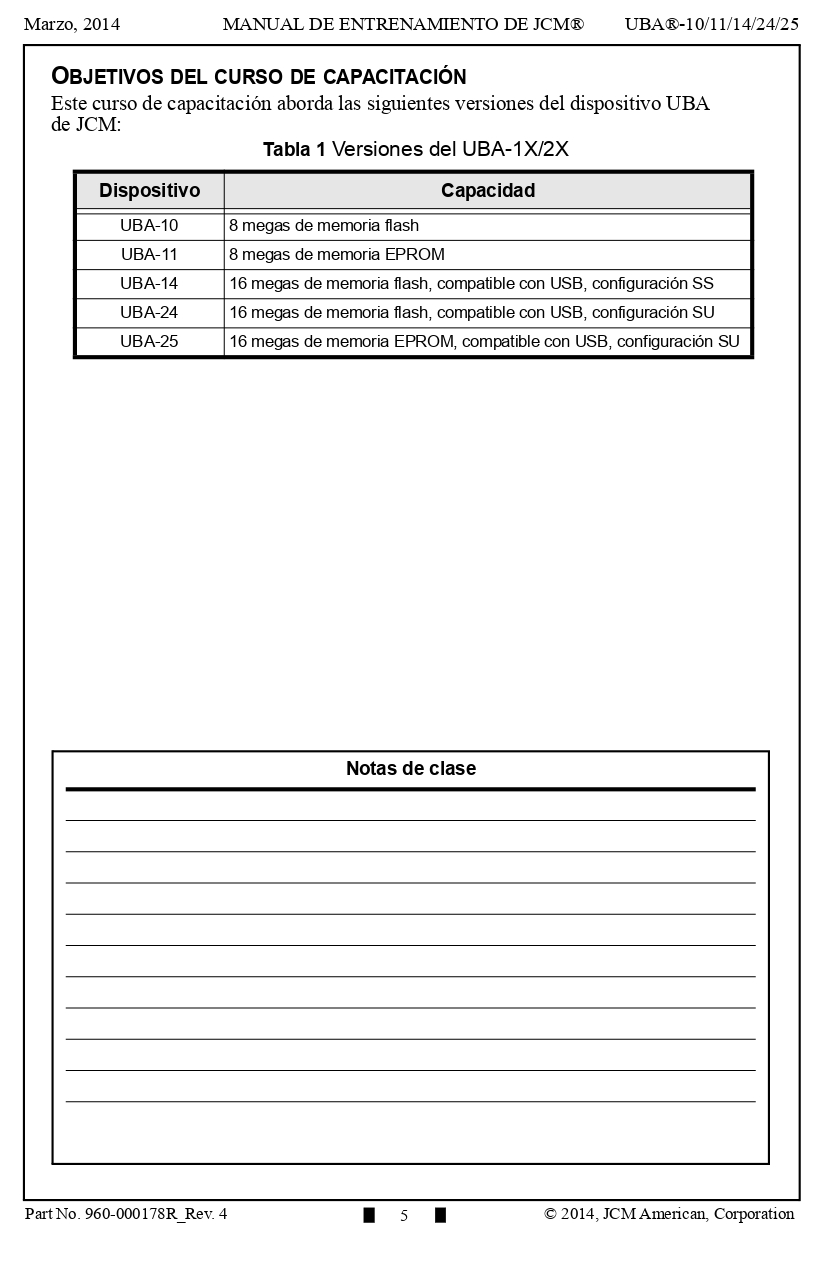
Los billeteros JCM UBA tienen referencias 10 / 11 / 14 / 24 / 25 según el sistema donde se vayan a utilizar bien sea Vending, Gaming o denominaciones en dólares o tamaños similares por el ancho de entrada y los tipos de sensores.
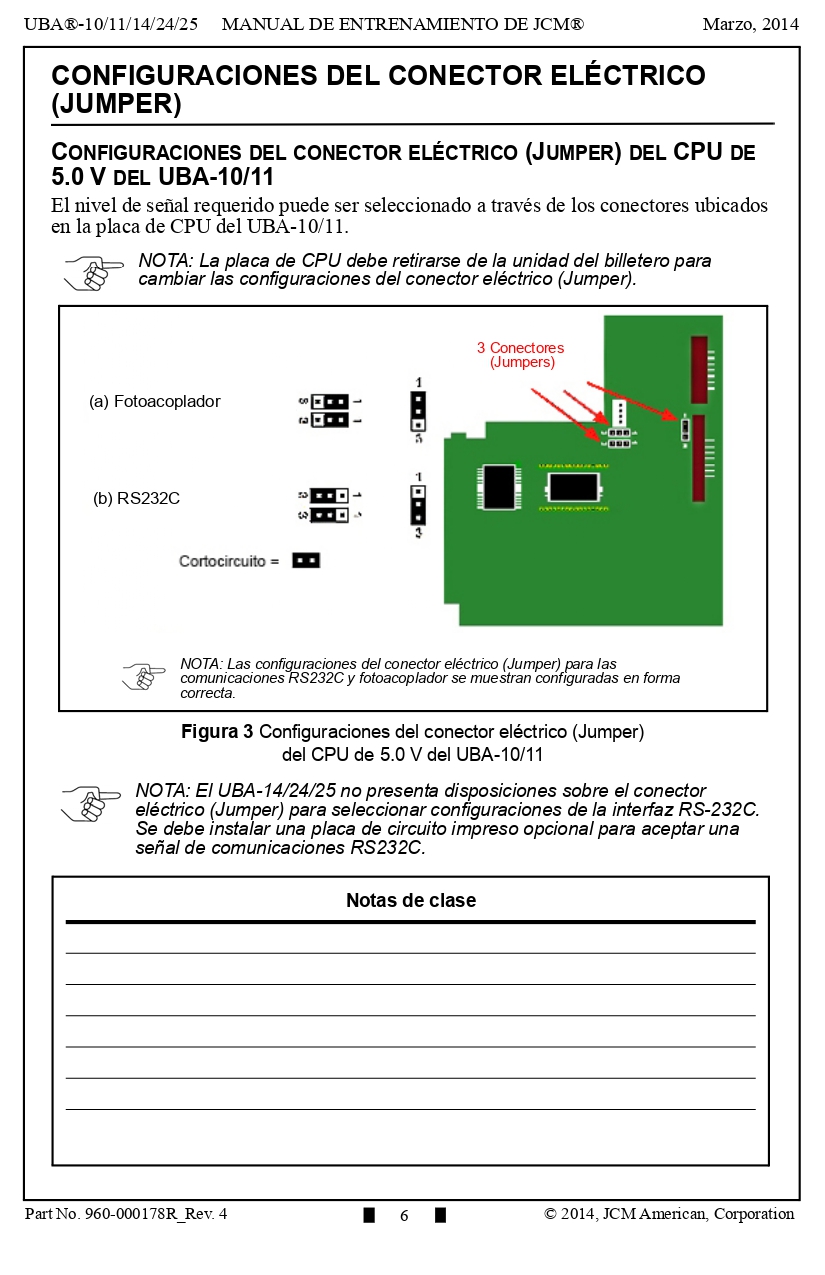
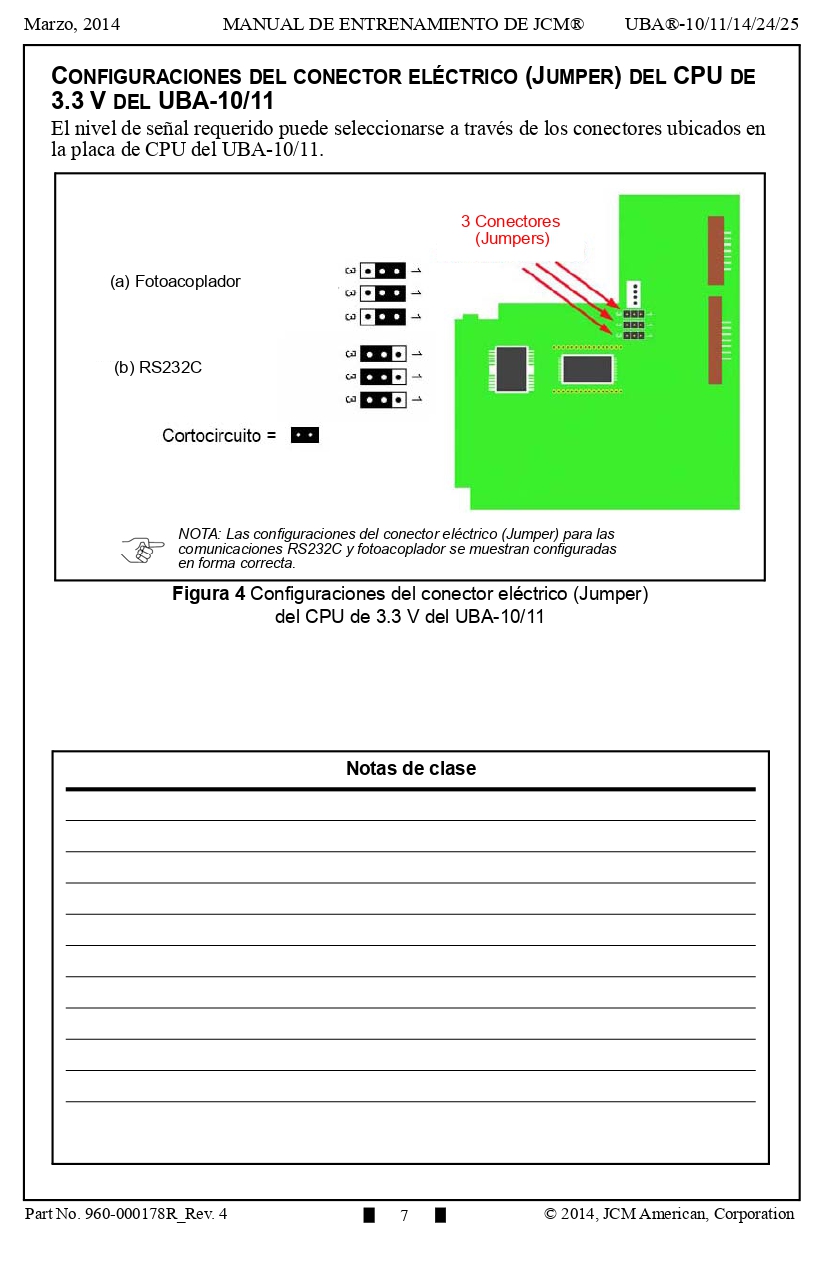
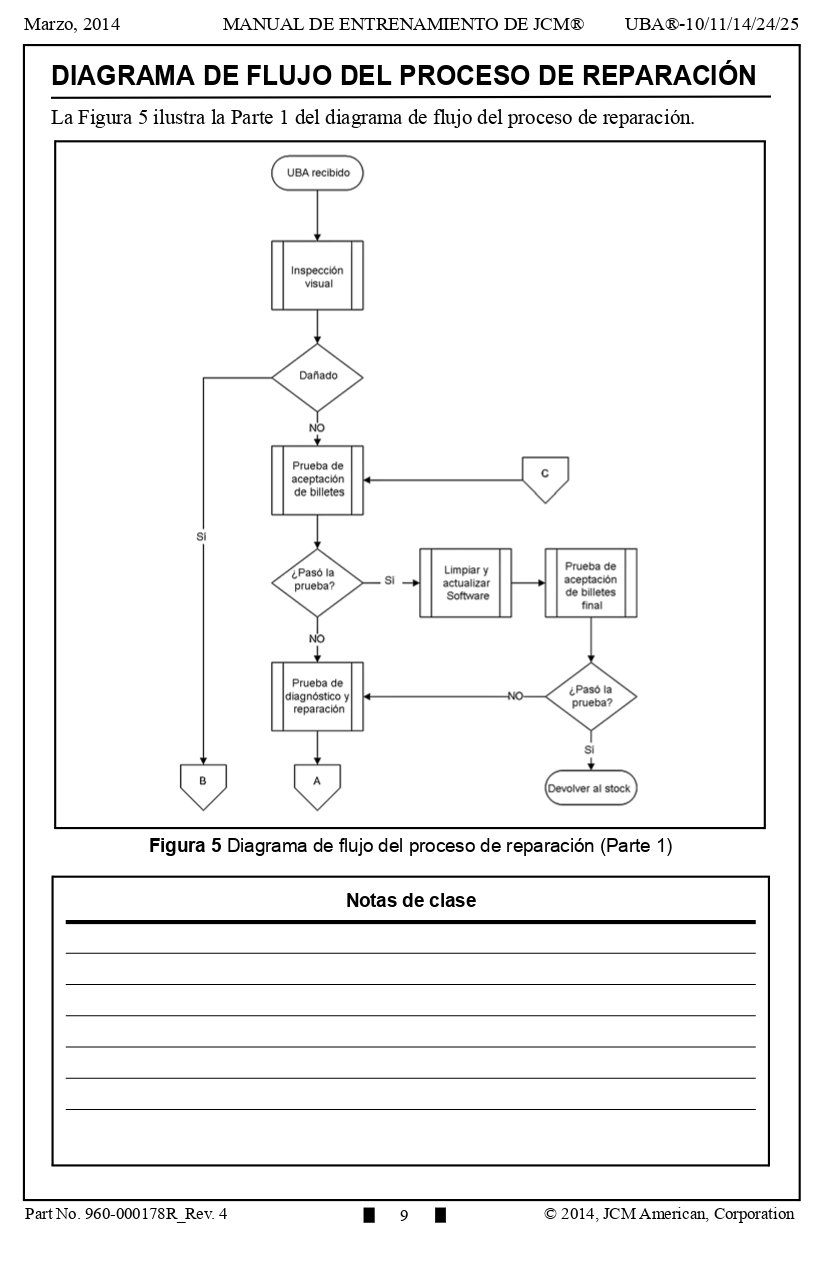
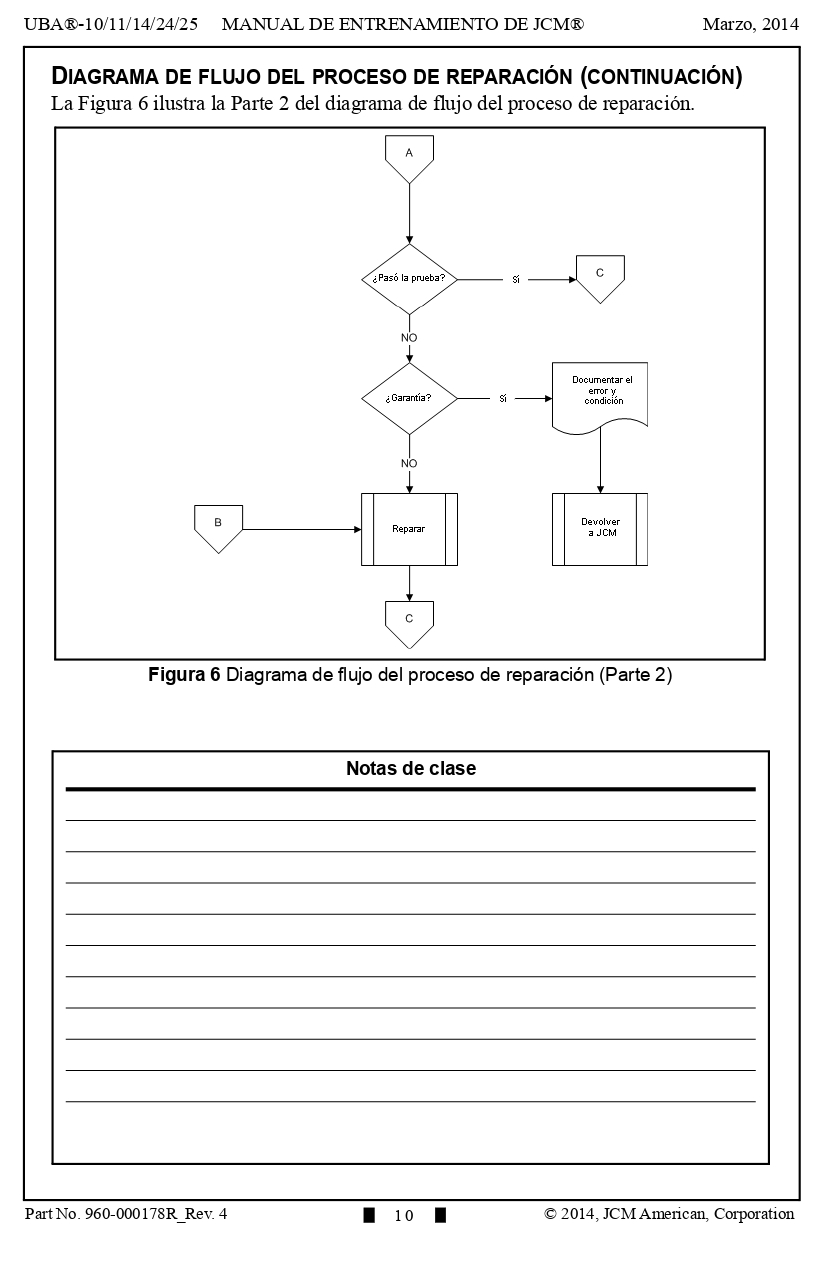
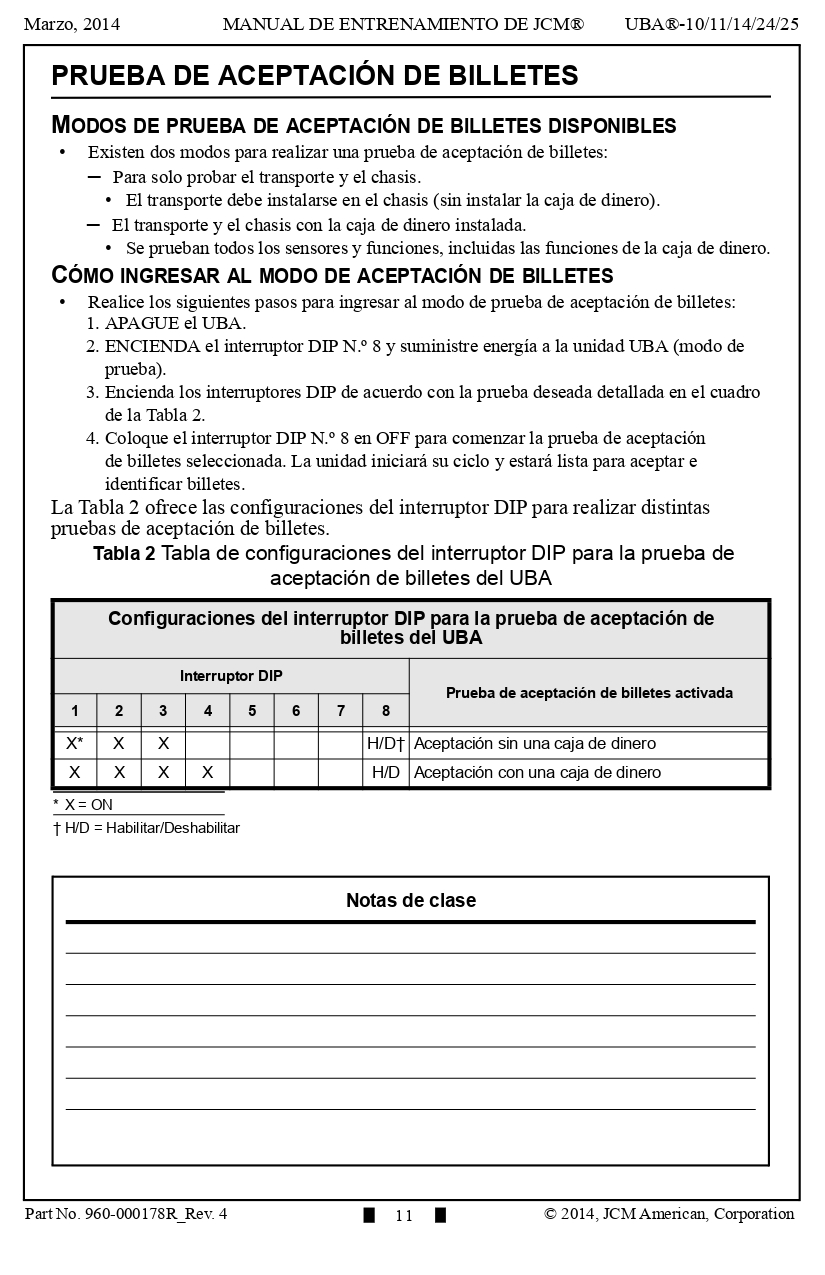
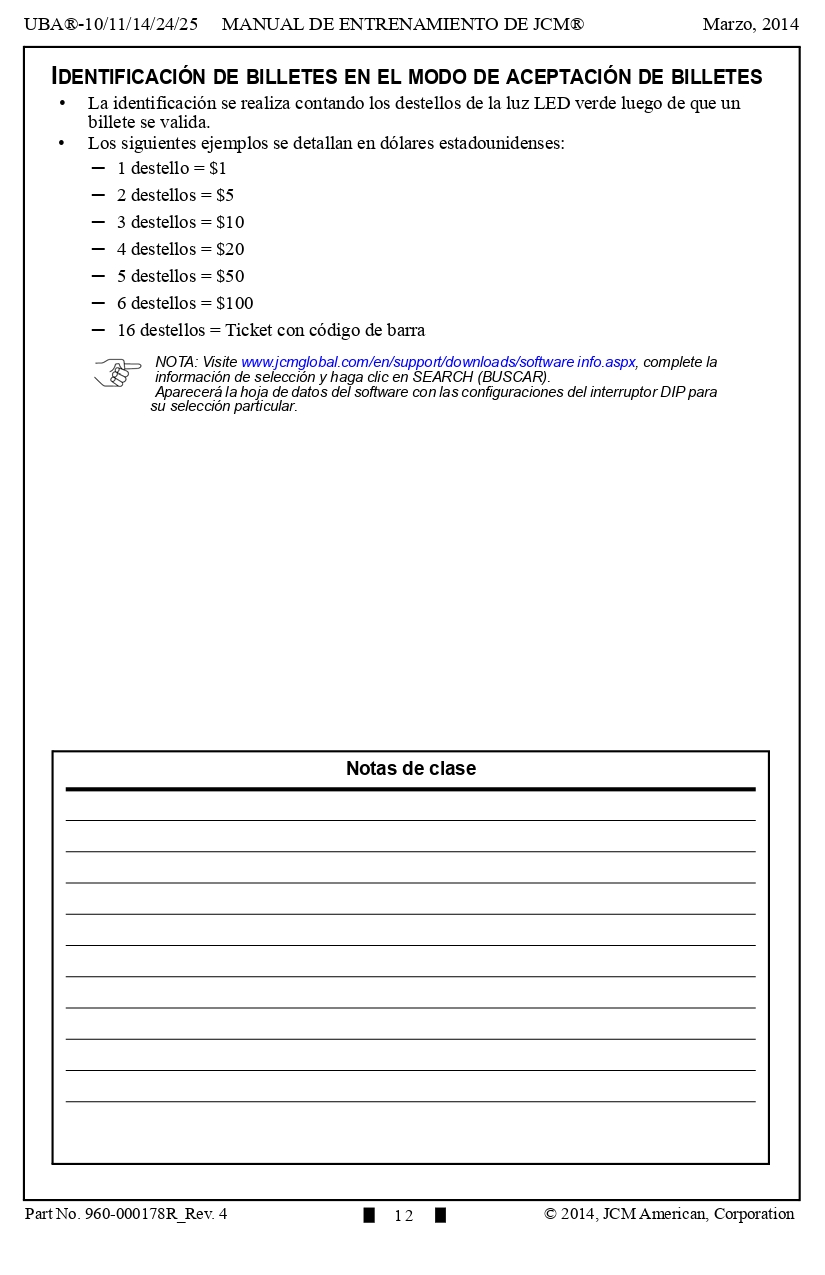
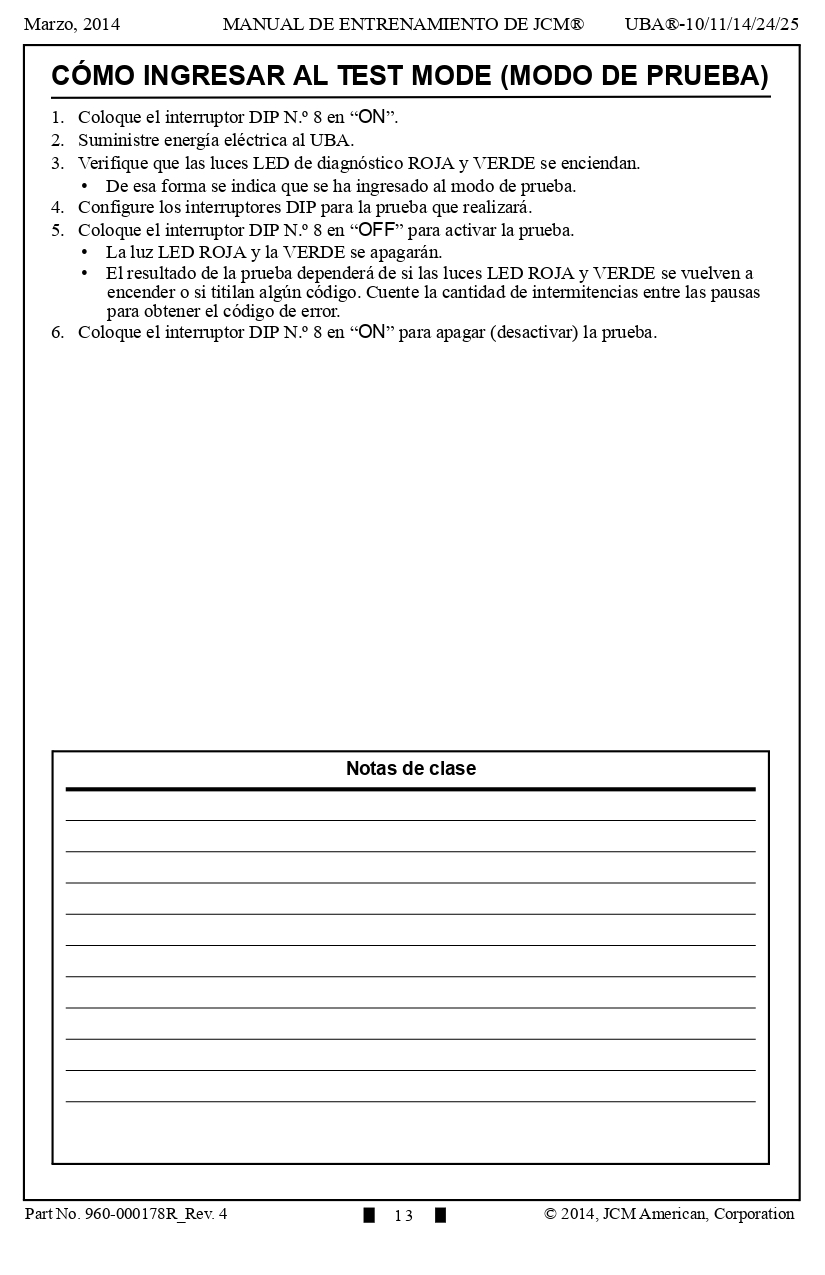
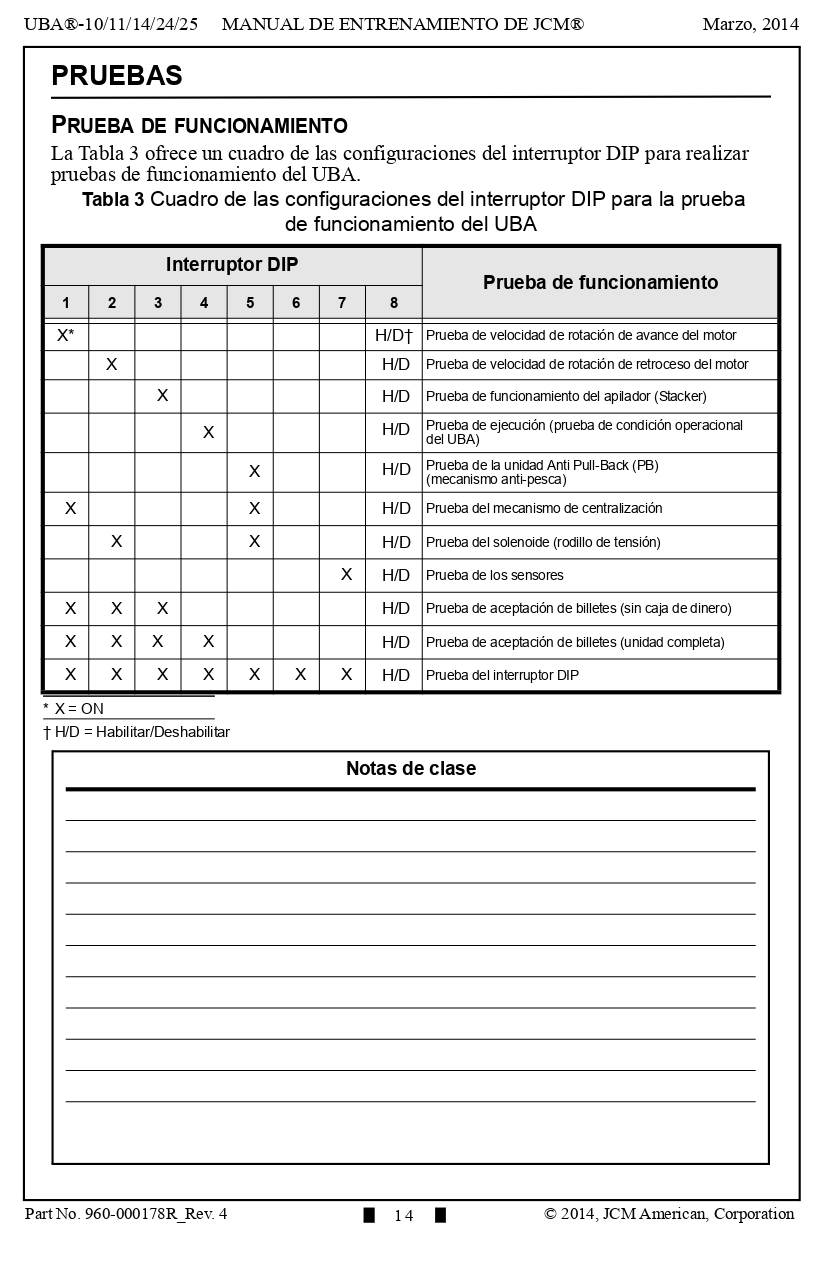
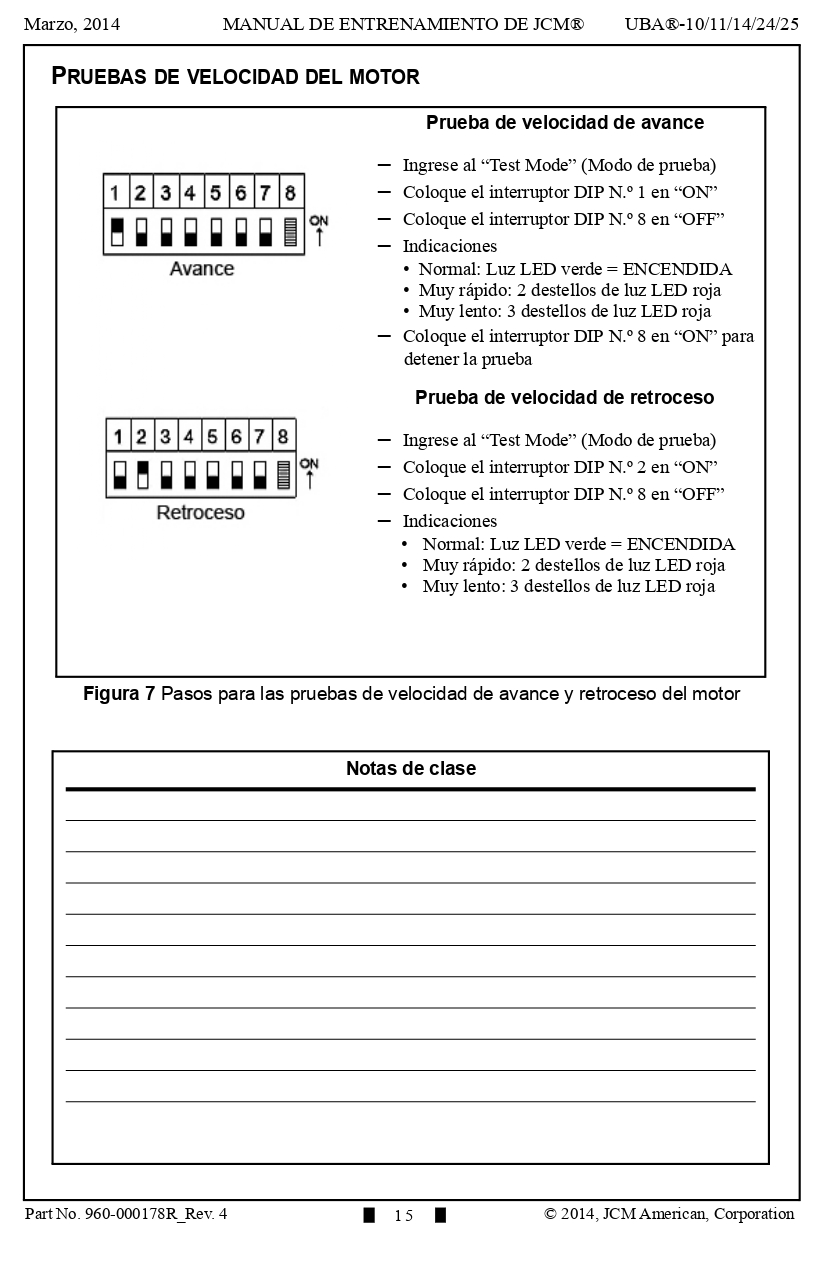
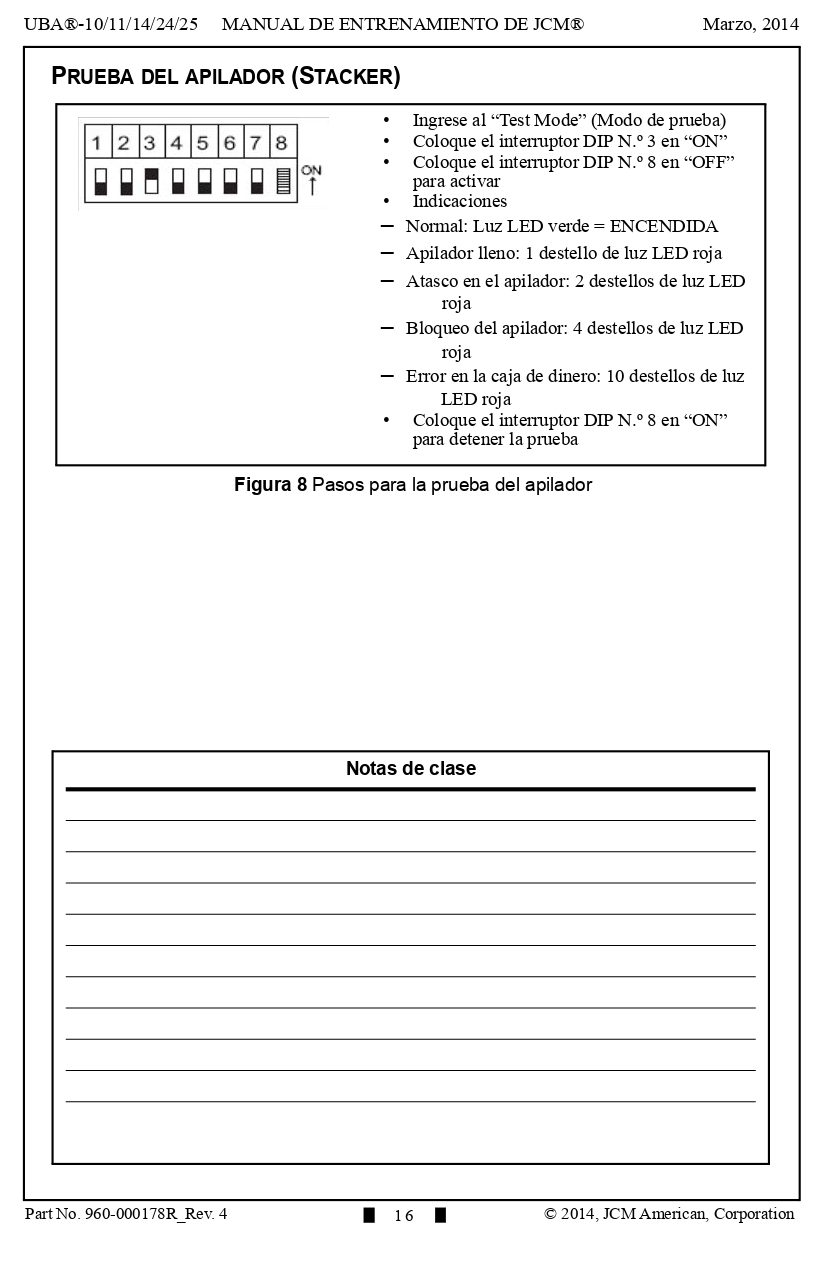
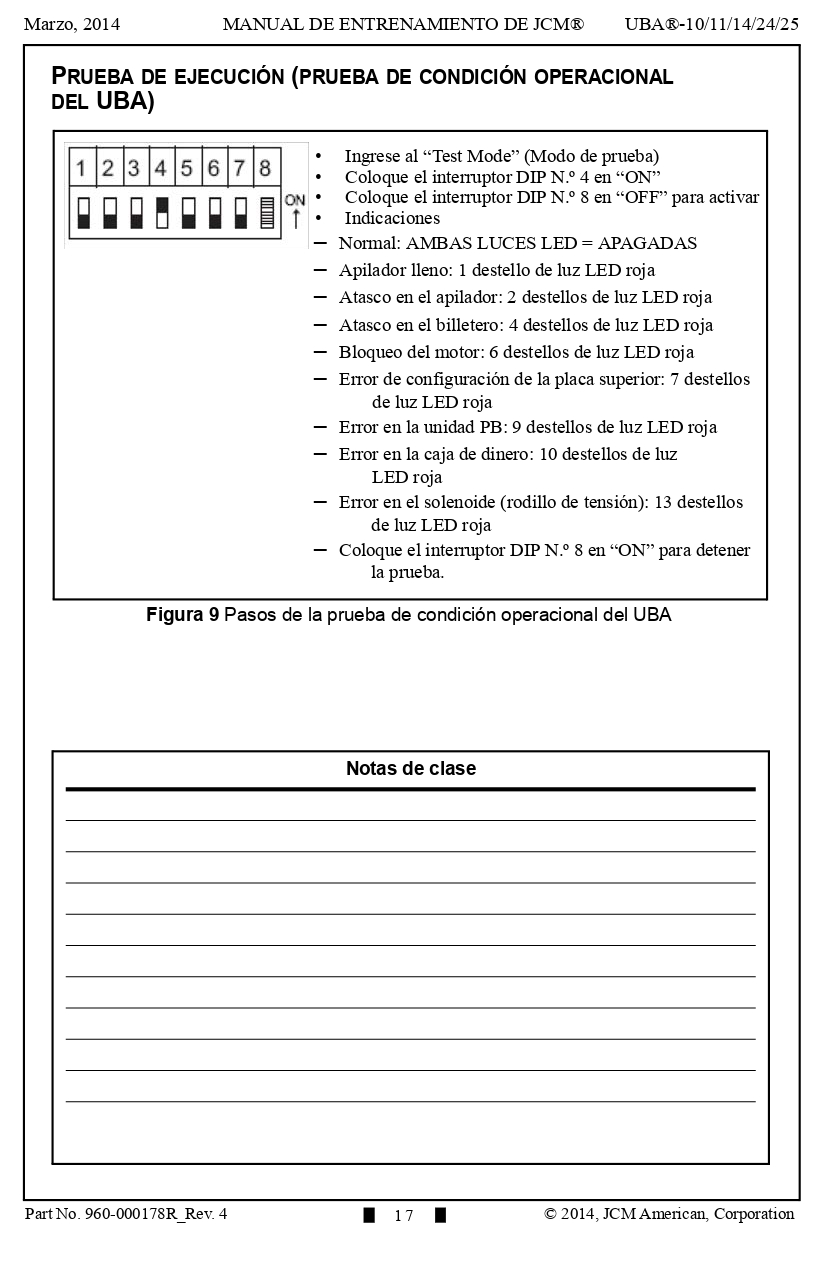
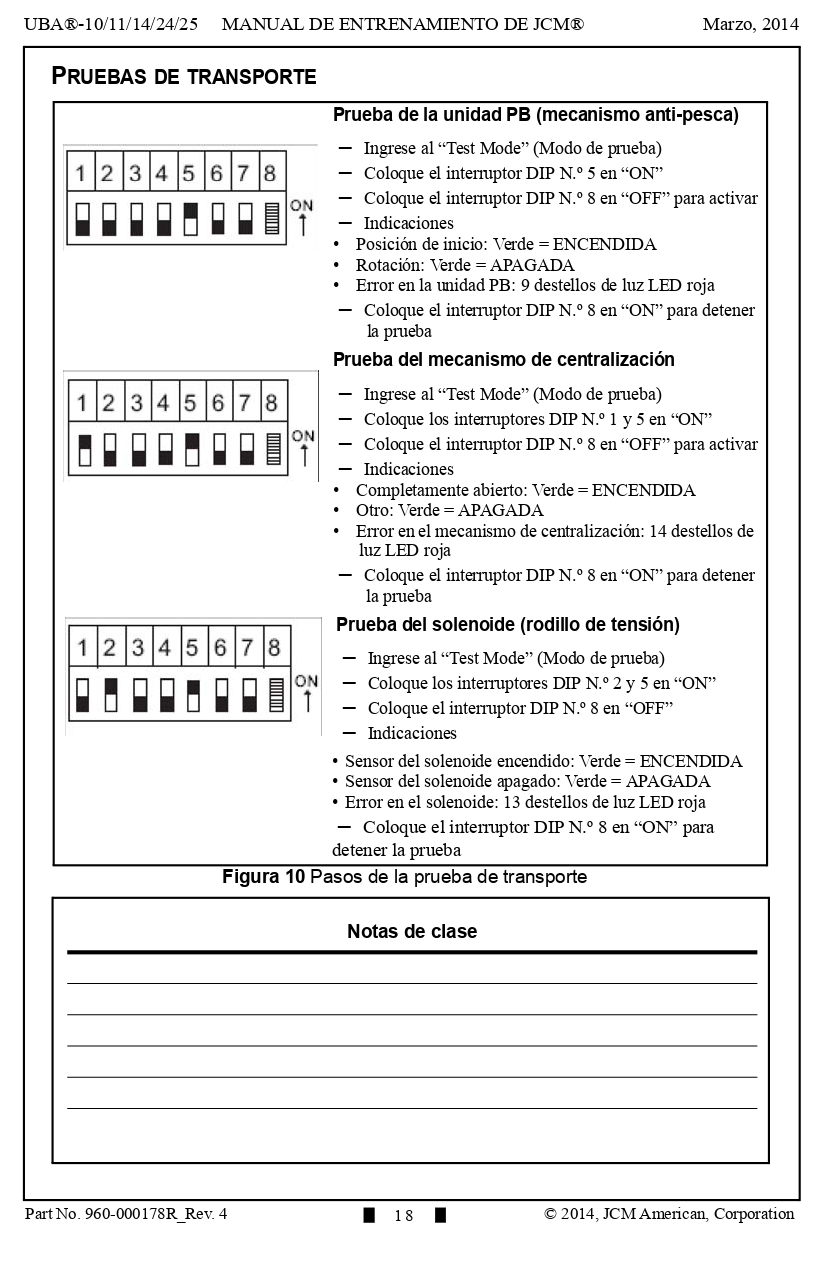
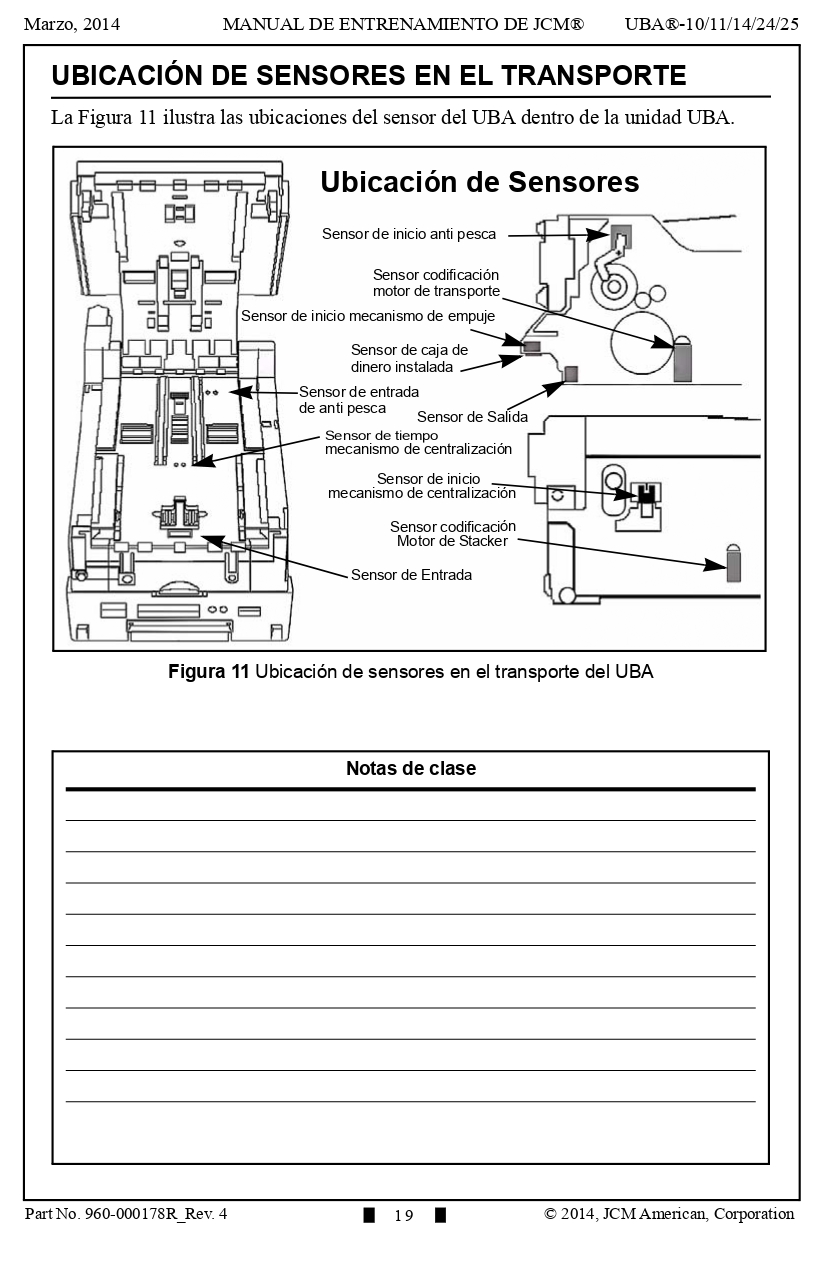
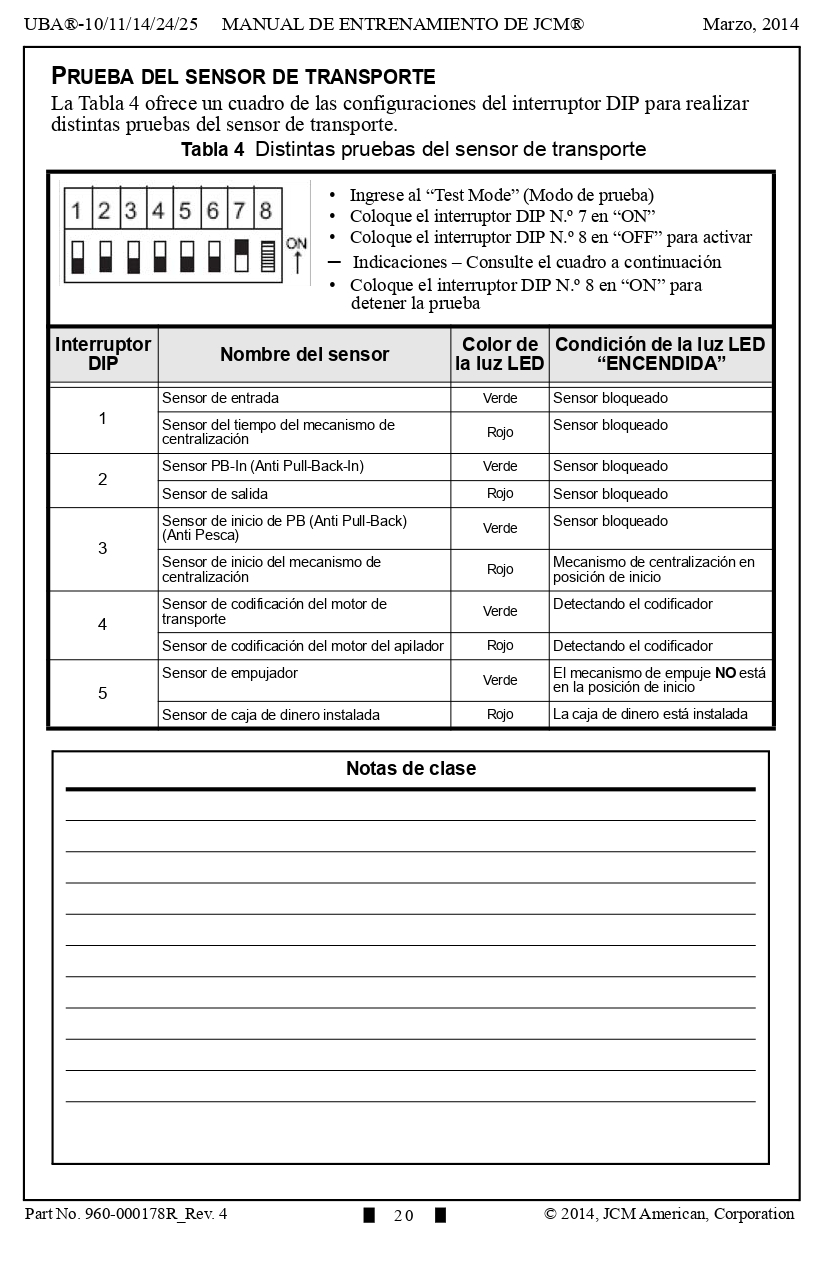
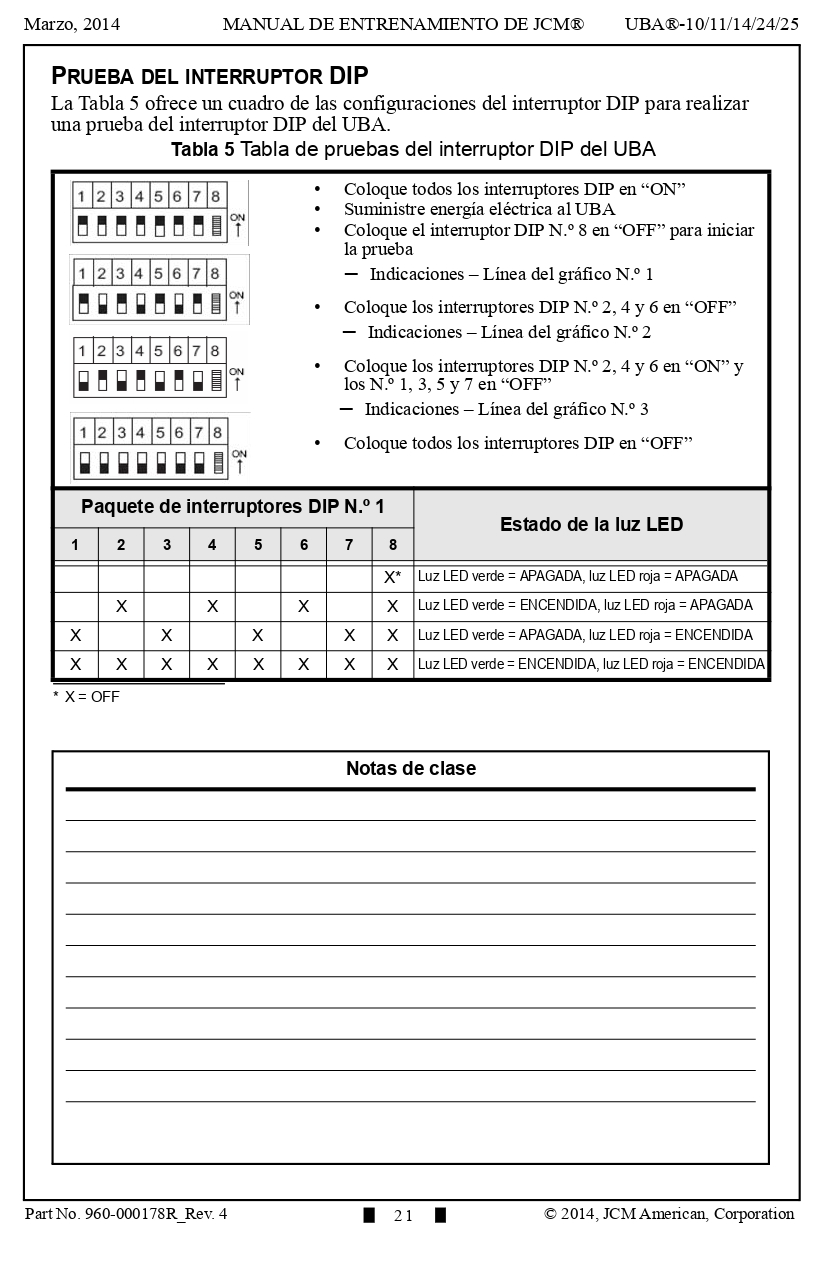
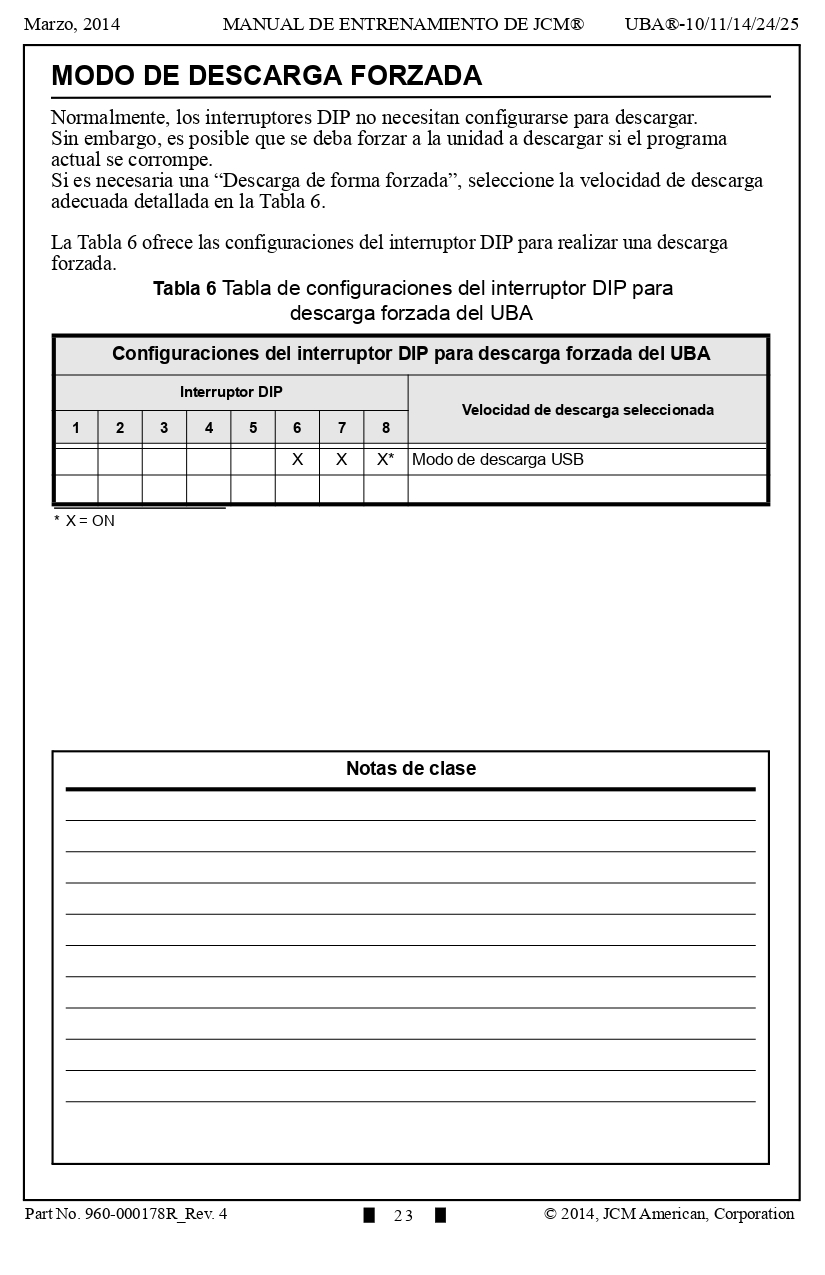
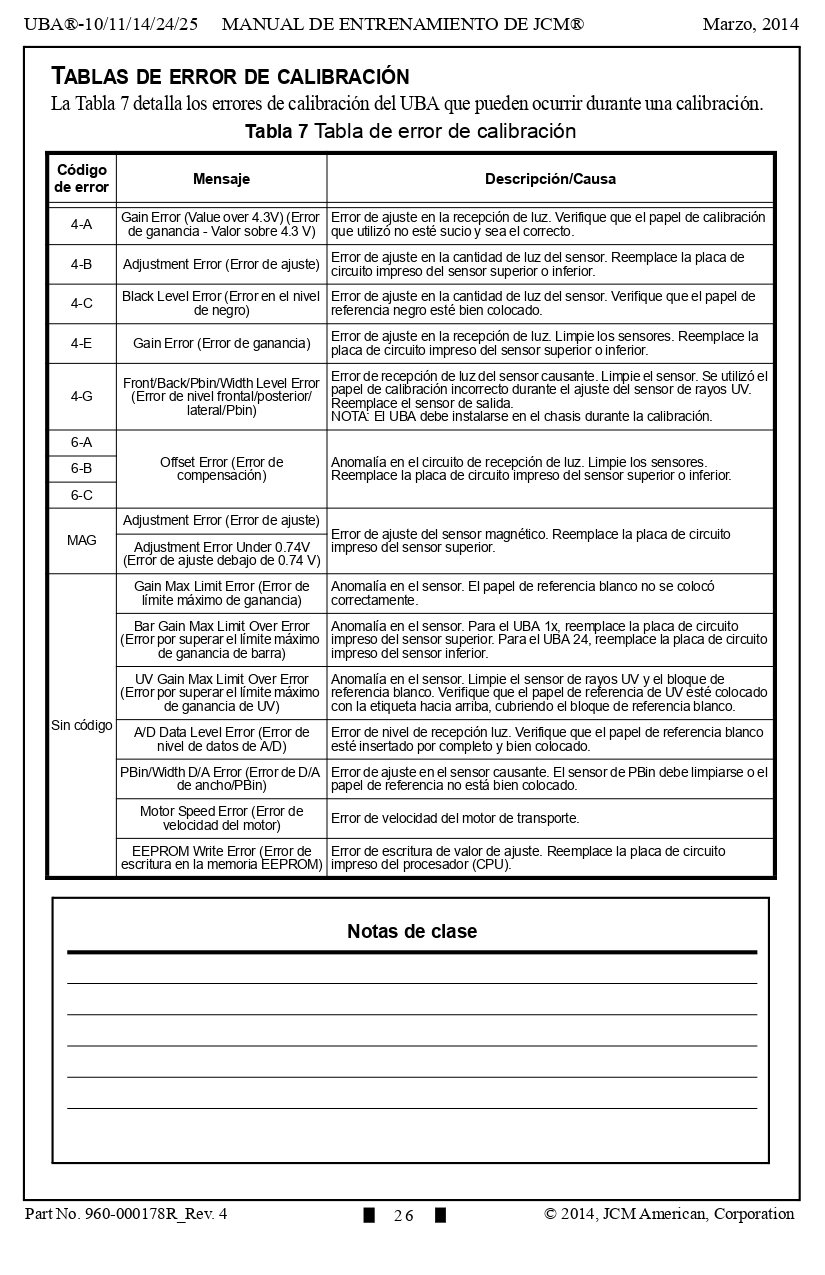
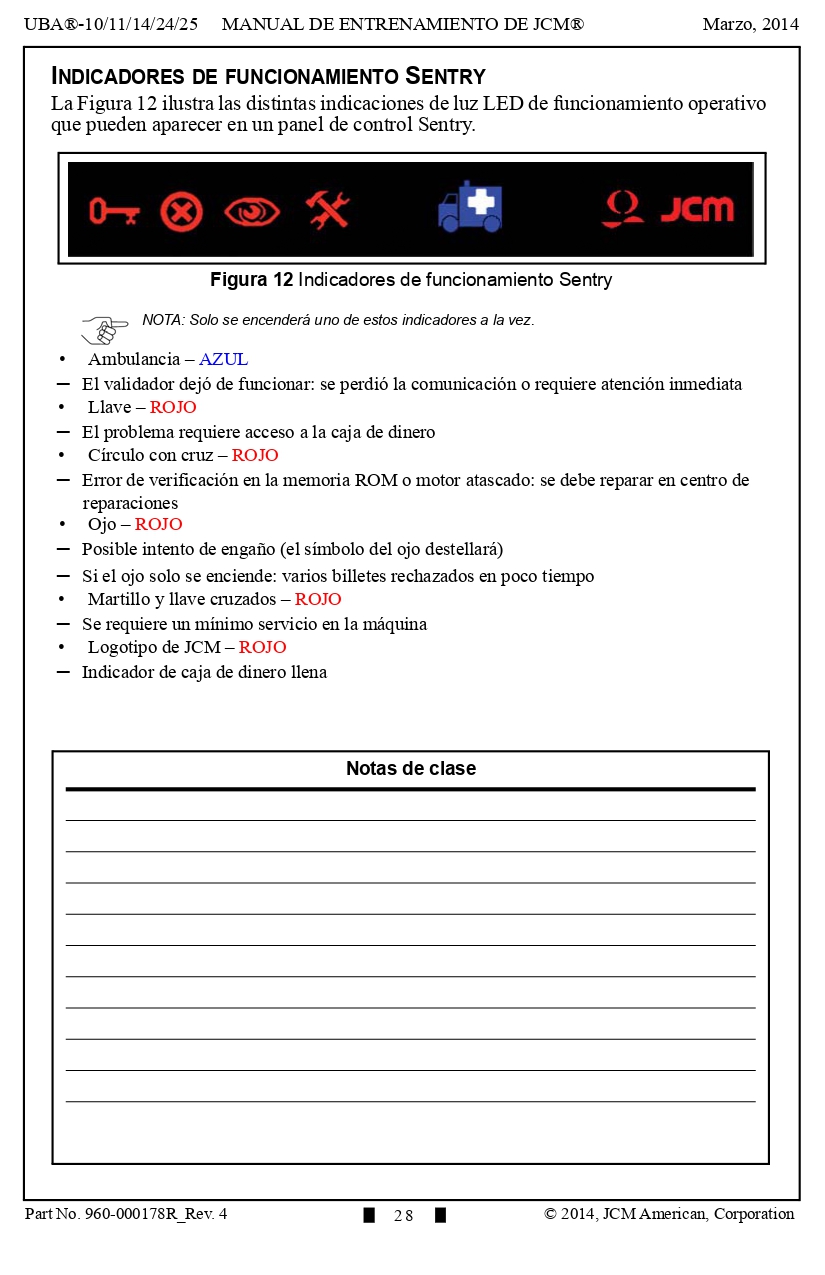
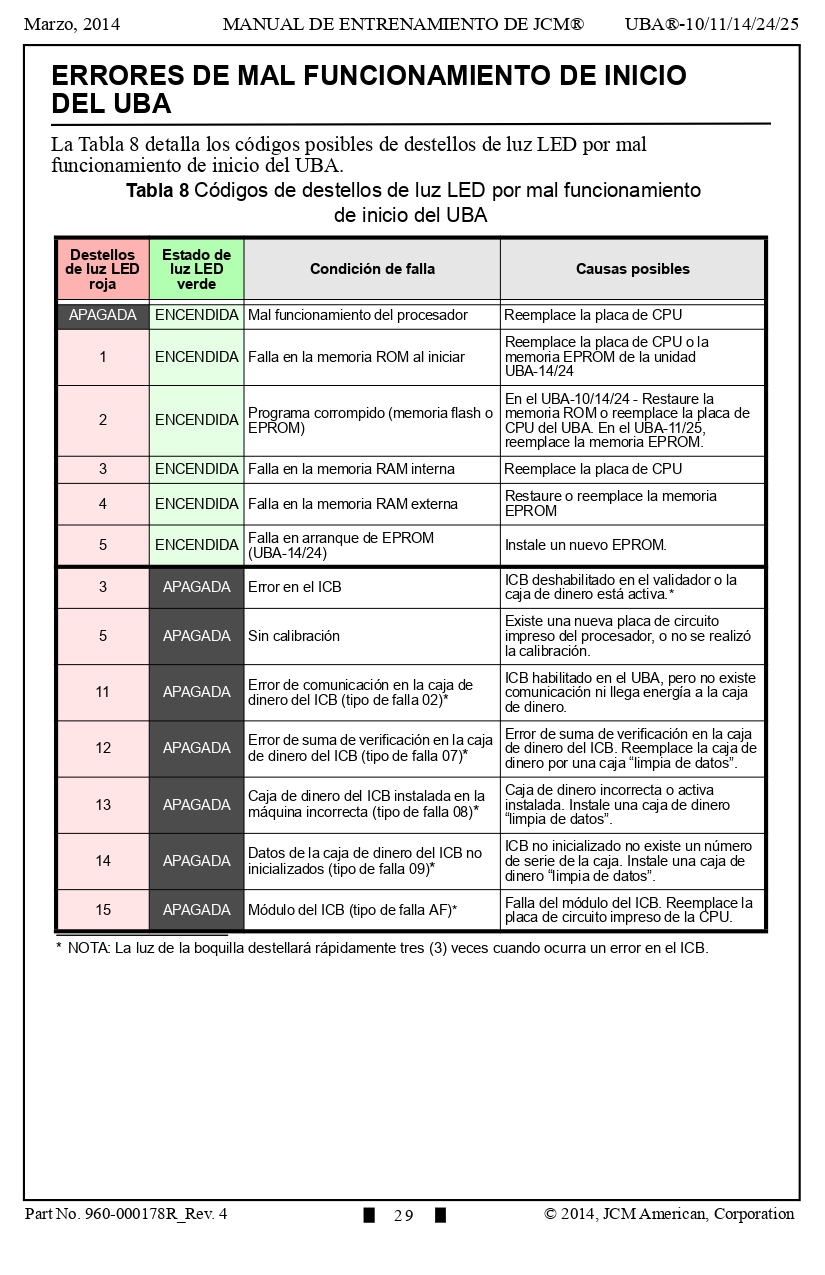
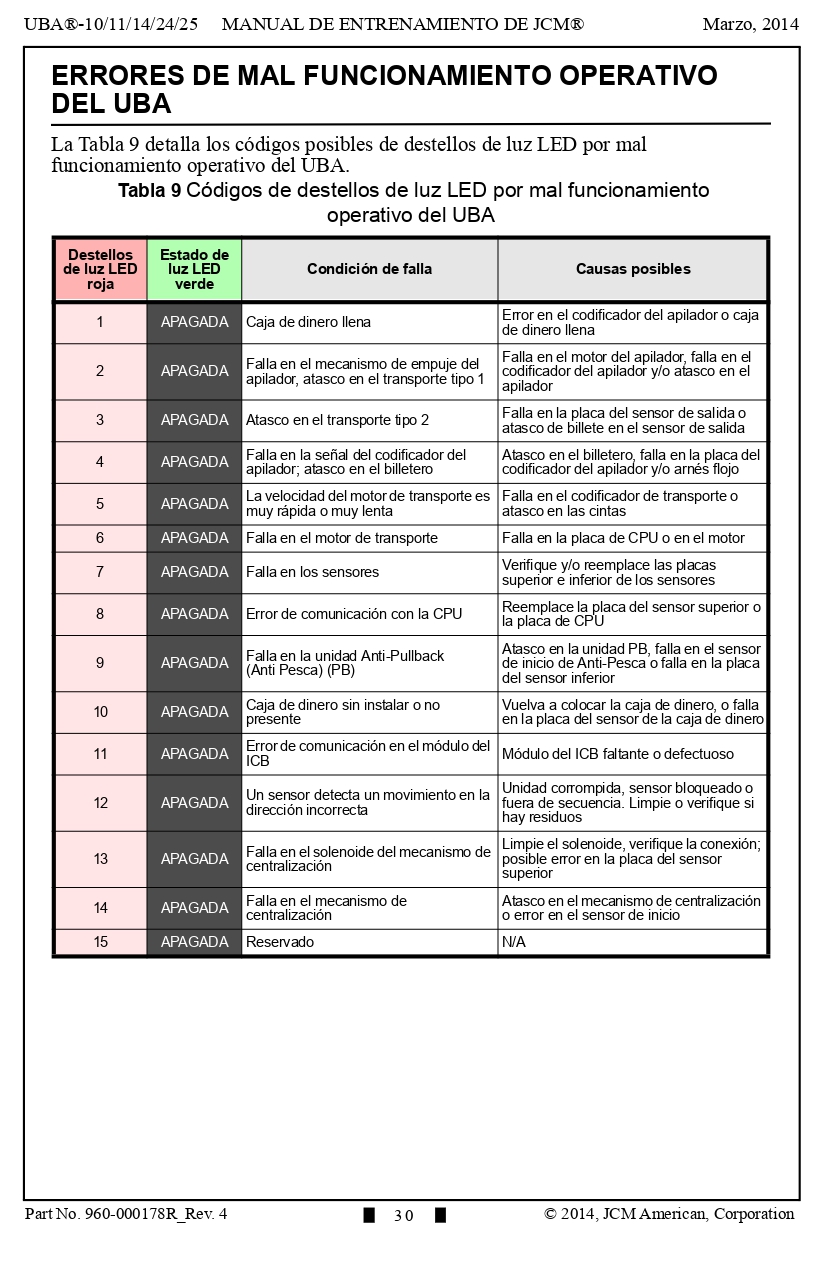
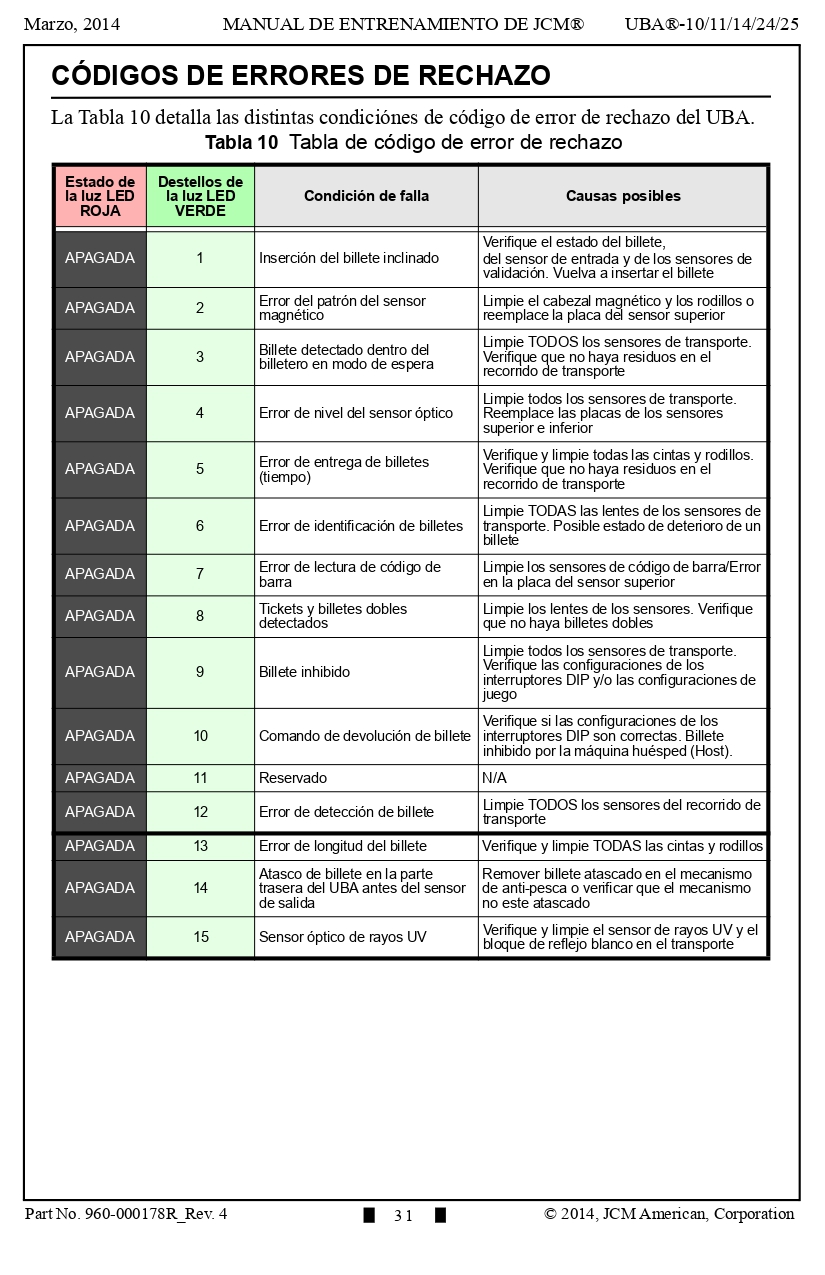
Los Billeteros JCM UBA-10 / 11 pueden trabajar con una interfaz RS-232 cosa que los JCM-UBA 14 / 24 / 25 no lo hacen debiendo utilizar una placa impresa para recibir este tipo de señales. En este MANUAL DE ENTRENAMIENTO JCM-UBA10 podrá probar modos de pruebas de aceptación de billetes ,como ingresar al modo de prueba , pruebas del apilador y prueba del stacker , calibración , y listado de errores .
Agregamos un enlace donde podrá descargar configuraciones para distintas monedas del país que requiera.