














Un optoacoplador, también llamado optoaislador o aislador acoplado ópticamente, es un dispositivo de emisión y recepción que funciona como un interruptor que es activado mediante una luz infrarroja emitida por un diodo led hacia un fototransistor o cualquier otro dispositivo capaz de detectar los infrarrojos.
Sabemos que para aislar una corriente de otra se utilizan transformadores que además de transformar nos permiten aislamiento eléctrico entre dos tensiones de diferente magnitud, por ejemplo; el primario a 110V y el secundario a 24V.
En otras palabras, los transformadores aíslan la tensión de entrada primaria de la tensión de salida secundaria usando acoplamiento electromagnético y esto se logra utilizando el flujo magnético que circula dentro de su núcleo de hierro laminado.
Pero también podemos proporcionar aislamiento eléctrico entre una fuente de entrada y una carga de salida utilizando solo la luz mediante el uso de un componente electrónico muy común y valioso llamado Optoacoplador.
Partes de un optoacoplador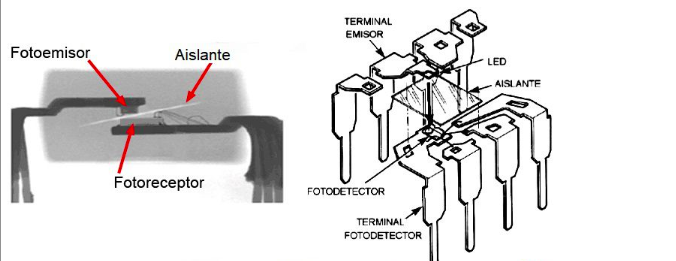
El optoacoplador esta compuesto por 2 elementos principales que son: un led infrarrojo y un elemento capaz de detectar la luz infrarroja como puede ser un fototransistor, un fototriac, fototransistor MOSFET, Fotodarlington, etcétera.
Como funciona
A pesar de ser un dispositivo un poco complejo su funcionamiento es fácil de entender, ya que solo cuenta con un emisor y un receptor. El emisor es un led infrarrojo que manda un haz de luz hacia el receptor que normalmente es un fototransistor, cuando este dispositivo capta la señal actúa como un interruptor cerrado y cuando se interrumpe actúa como un interruptor abierto.
Tipos de optoacopladores
Encapsulado DIP
Este tipo se utiliza principalmente en las placas electrónicas ya que su funcionamiento se basa en activar y desactivar el circuito a través del voltaje. Se utilizan principalmente para aislar posibles interferencias entre dos etapas que operan a diferentes voltajes, como son la etapa de control con la de potencia.
Existen diferentes versiones que se distinguen por su tipo de salida o por su uso
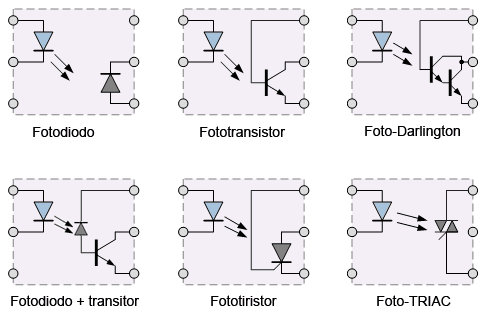
- Fototransistor: Es el más común de todos y controla corriente directa en su salida.
- Fotodarlington: Se agrega un arreglo darlington que tiene dos transistores juntos, lo que se traduce en una gran ganancia de corriente.
- Fototiristor: son como los fototransistores o FET muy similares a sus correspondientes convencionales, excepto en la adición de una ventana o lente para enfocar la luz en un área apropiada. Tienen tres terminales, y por tanto, el umbral del disparo óptico puede controlarse electrónicamente.
- Fototriac: Esta diseñado para controlar corriente alterna en su salida.
- Schmmit trigger: En este su salida es lógica ya sea, 0 o 1.
- Entrada AC – salida transistor: Con este tipo se puede hacer un cambio de corriente alterna a corriente continua.
Algunos de los optoacopladores más usados para aplicaciones educativas son: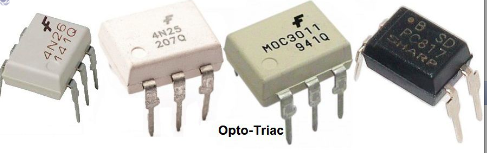
- 4N25 – Salida para transistor
- MOC3011 – Optoacoplador con salida para TRIAC
- MOC3010 – Salida a TRIAC
- 4N35 – Salida a un transistor
- PC817 – Salida a transistor
Como sensor 
Este tipo se utiliza como un sensor óptico ya el emisor y el receptor están colocados linealmente y cuando se emite la luz infrarroja esta rebota en una superficie lo que hace que regrese al receptor, cuando el receptor no recibe ninguna señal quiere decir que no hay ningún objeto cerca.
Como interruptor óptico
Este prácticamente es el mas vistoso de todos ya que se utiliza como una interfaz en los circuitos lógicos, por lo regular se utiliza para que el usuario pase una tarjeta o algún objeto con poco grosor. Cuando pasas el objeto la señal se interrumpe y esto ocasiona un cambio de estado lo que indica que tu circuito lógico puede actuar ya sea para activar o desactivar cualquier cosa, como por ejemplo un motor, una cerradura, un simple led, etcétera.
Una de las funciones mas usadas es el de Relé óptico, para aislar dos circuitos, uno que trabaja a baja tensión (circuito del LED), llamado de control y otro a más tensión o diferente (circuito detector) llamado de potencia.