Touchscreen. El propósito de las pantallas táctiles o Touchscreen es ser una interfaz de entrada; son paneles táctiles colocados sobre paneles de cristal líquido o cualquier pantalla, que permiten la entrada del usuario y la visualización de funciones.

Vidrio Touchscreen para monitor plano

Vidrio Touchscreen para CRT curvo
¿Dónde se utilizan las pantallas táctiles?

Las pantallas táctiles se han vuelto familiares para muchos de nosotros. Los fabricantes de Maquinas de Casino, teléfonos inteligentes y portátiles utilizan pantallas táctiles para sus pantallas, y los bancos utilizan pantallas táctiles en sus cajeros automáticos.

Pero más allá de eso, interactuamos cada vez más con pantallas táctiles en tabletas, consolas de juegos portátiles, sistemas de navegación para automóviles, estaciones multimedia, juegos arcade, paneles informativos, sistemas de pedidos de restaurantes y muchos lugares e industrias más. Tan sólo en los últimos años, se han vuelto comunes en nuestra vida diaria.
Como pegar un touch screen a la pantalla

Tecnología táctil resistiva
 tecnología-táctil-resistiva
tecnología-táctil-resistiva
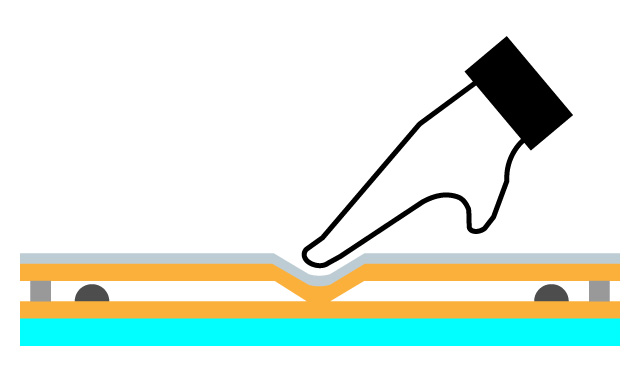
Las pantallas táctiles resistivas están compuestas por dos capas conductoras de electricidad de una fina película metálica separadas por un pequeño espacio de aire. Cuando se aplica presión a la superficie de la pantalla táctil, las dos hojas se presionan entre sí y se completa un circuito.
Las ventajas de las pantallas táctiles resistivas son que su producción es relativamente barata y su uso es rentable. También utilizan algoritmos sencillos.
Tecnología de guía electromagnética
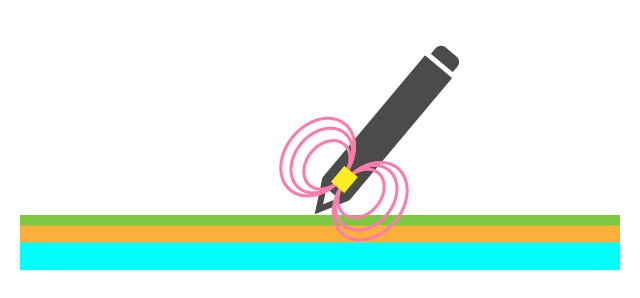
Tecnología de guía electromagnética
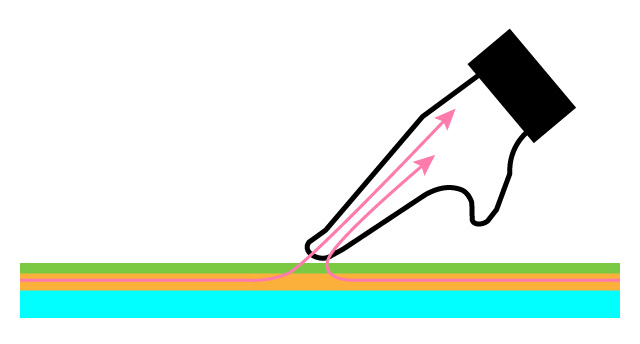
Una pantalla táctil de guía electromagnética envía una carga eléctrica que reacciona con un lápiz. Luego, el lápiz envía una señal que permite a la pantalla táctil identificar con precisión su posición. La colocación de un sensor de inducción electromagnética debajo de una pantalla de cristal líquido permite realizar operaciones muy detalladas, a diferencia de una pantalla táctil capacitiva.
Tecnología de guía electromagnética
Las pantallas táctiles ópticas utilizan emisores de infrarrojos combinados con sensores de imagen de infrarrojos para escanear continuamente la pantalla táctil. Cuando un objeto entra en contacto con la pantalla táctil, bloquea parte de la luz infrarroja que reciben los sensores. Luego, la ubicación del contacto se calcula utilizando información de ambos sensores y triangulación matemática. Al igual que las pantallas táctiles acústicas de ondas superficiales de ultrasonido, las pantallas táctiles ópticas tienen una alta transmitancia y, debido a que utilizan sensores infrarrojos, pueden funcionar con materiales conductores y no conductores. Las pantallas táctiles ópticas admiten eventos y gestos multitáctiles calculados mediante algoritmos. El tamaño de las pantallas táctiles ópticas es fácil de escalar, lo que las hace muy adecuadas para noticias de televisión y otras transmisiones televisivas.
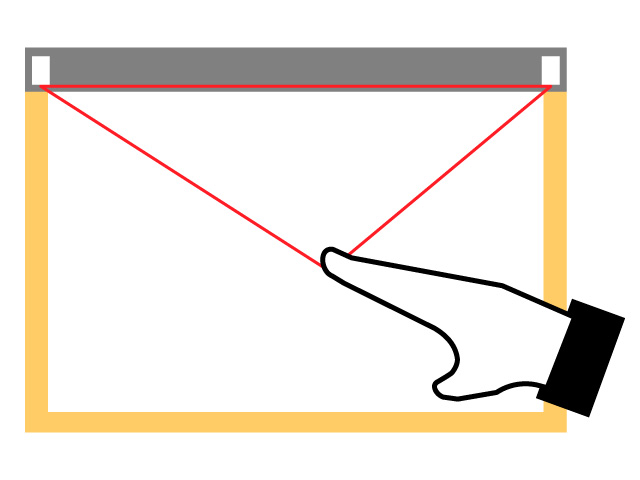
Tecnología de ondas acústicas de superficie
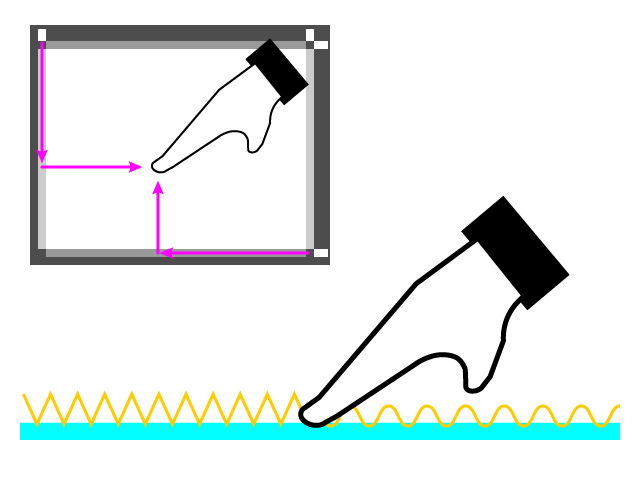
Las pantallas táctiles acústicas de ondas superficiales de ultrasonido funcionan rastreando ondas sonoras ultrasónicas para identificar la ubicación de puntos en una pantalla. Las pantallas táctiles acústicas de ondas superficiales están fabricadas con un solo panel de vidrio, un transmisor y dos receptores piezoeléctricos. El transmisor produce ondas ultrasónicas que se mueven sobre la pantalla, se reflejan y luego son leídas por los receptores piezoeléctricos receptores.
Cuando se toca la superficie del vidrio, algunas ondas acústicas se absorben, pero otras rebotan y son detectadas por los receptores piezoeléctricos. Debido a que las pantallas táctiles acústicas de ondas superficiales de ultrasonido utilizan vidrio, tienen una alta transmitancia y una larga vida útil.
Tecnología táctil capacitiva
Las pantallas táctiles capacitivas están recubiertas con una película conductora transparente. Cuando la punta de un dedo entra en contacto con una pantalla táctil capacitiva, puede utilizar la conductividad del cuerpo humano como medio de entrada. Las pantallas táctiles capacitivas electrostáticas se utilizan en numerosos teléfonos inteligentes, como los iPad y iPhone de Apple.

A diferencia de las pantallas táctiles de tipo resistivo, las pantallas táctiles capacitivas electrostáticas tienen una gran capacidad de respuesta, pero no pueden reaccionar a los lápices ópticos ni al toque de una uña.
Como cambiar un touchscreen (pantalla táctil) de un monitor
Patrones de detección táctil capacitiva propios y mutuos
Los modelos capacitivos mutuos se pueden hacer aún más robustos contra gotas de agua o incluso corrientes mediante una programación adecuada a prueba de fallos en el controlador principal.
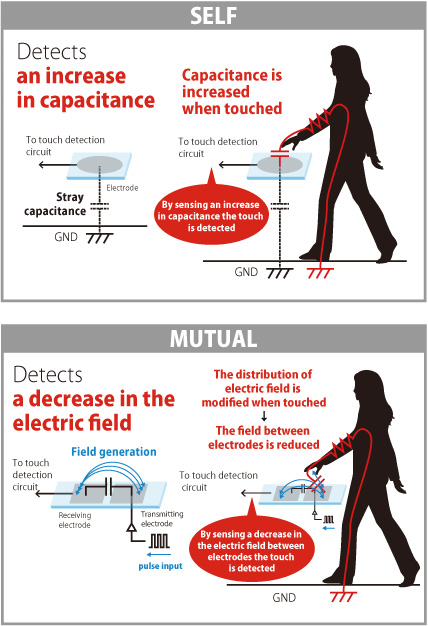
Una pantalla táctil capacitiva de superficie utiliza una pantalla transparente con una capa de película conductora superpuesta sobre una subcapa de vidrio. Luego se aplica una capa protectora a la película conductora. Se aplica voltaje a los electrodos en las cuatro esquinas de la subcapa de vidrio para generar un campo eléctrico uniforme.
Cuando un conductor toca la pantalla, la corriente fluye desde los electrodos al conductor. Luego se calcula la ubicación del conductor en función de la actividad de las corrientes. Las pantallas táctiles capacitivas de superficie se utilizan a menudo para paneles de pantalla grandes.
A diferencia de las pantallas táctiles capacitivas de superficie, que utilizan cuatro electrodos y una película conductora transparente, las pantallas táctiles capacitivas proyectadas utilizan una gran cantidad de electrodos transparentes dispuestos en un patrón específico y en dos capas separadas.
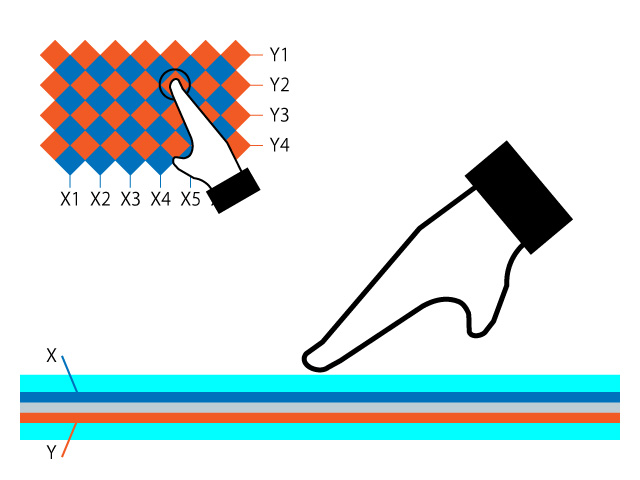
Cuando un conductor se acerca a la pantalla, el campo eléctrico entre los electrodos cambia y los sensores pueden identificar instantáneamente la ubicación en la pantalla. Las pantallas táctiles capacitivas proyectadas pueden registrar con precisión eventos multitáctiles.