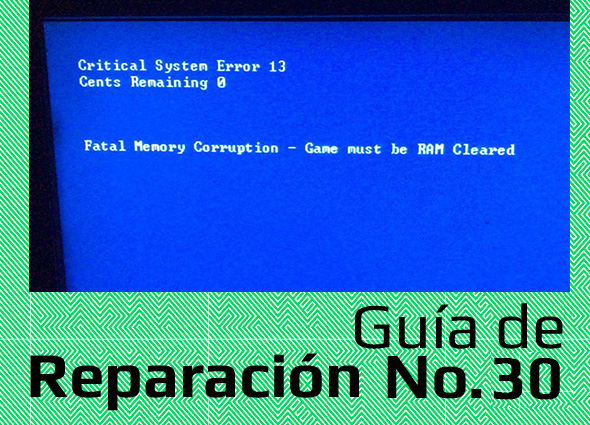
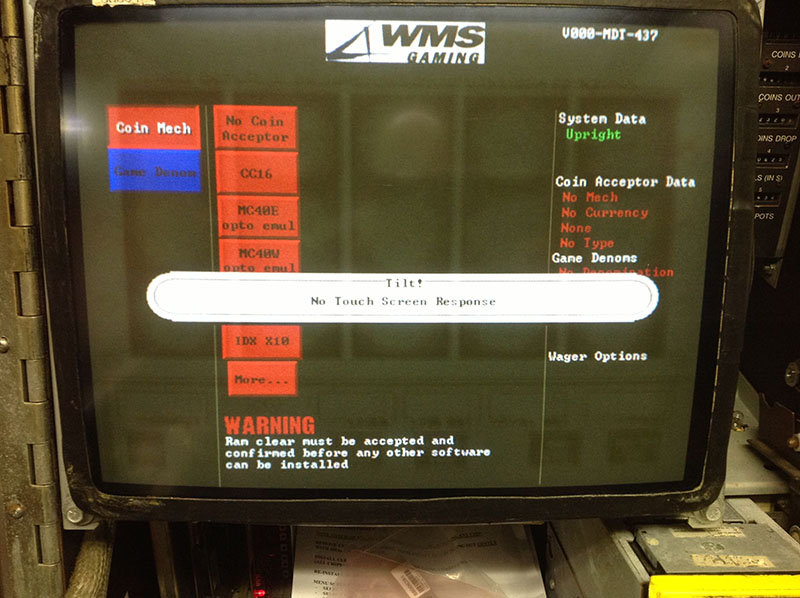
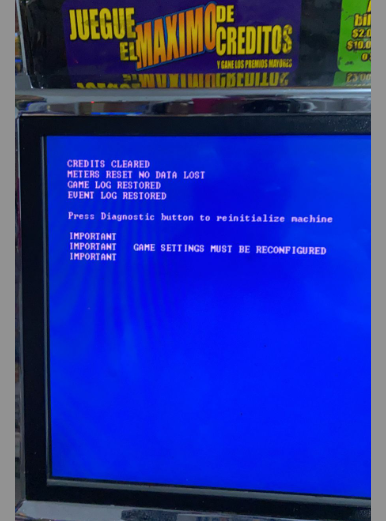
En esta guía de reparación nos vamos a centrar en las máquinas del tipo Williams NXT. Critical System error 13 Es una de las posibles situaciones a las que se enfrenta un Supertecknic@ y que nos puede dejar desconcertad@s:
1. Alinee la muesca (ranura) del chip (integrado) y lo coloqué con la marca del socket , y cuando encendí la máquina, la pantalla comenzó a temblar, pero no dio imagen.
2. Verifiqué que el voltaje de la batería y era de 4.0v y volví a colocar ambas placas.
3. Intenté rehacer el procedimiento muchas veces, pero todavía nada
4. He intentado reiniciar con la llave y el botón de la tarjeta y el botón de reinicio ubicado encima de la tolva del Hopper (sólo para referencia porque no usamos Hopper , sólo billetero).
5. Incluso quité la batería durante unas horas. ¿Podría haber quemado el chip del juego o algo más?
Pudiera ser que el monitor tenga un pin partido o bien se ha dañado y deba ser reparado, lo pensamos porque si enciende y se ve “temblando”; pero si se prueba el monitor en otra máquina o una computadora portátil y enciende entonces se debe descartar que sea el daño.

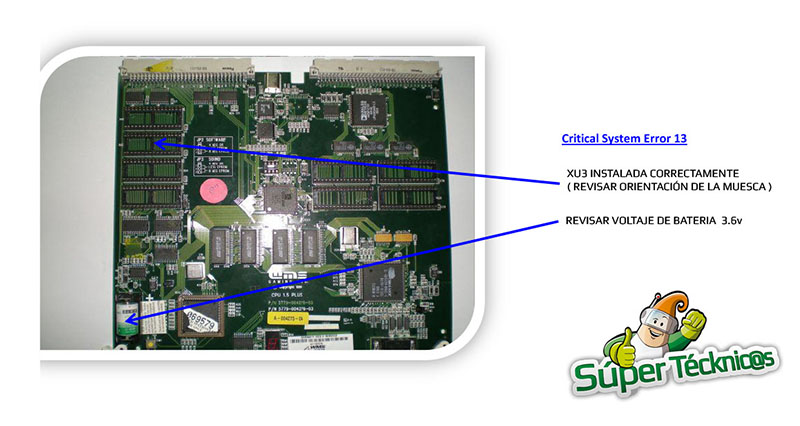
Primero asegúrese de que todos los chip (integrados) tengan la muesca (ranura) orientada en la dirección correcta. Si conecta el chip (integrado) al revés, puede quemarlo y, como mínimo, necesitará borrarlo y volverlo a grabar.
Segundo saque todos los chip (integrados) límpielos y vuelva a ponerlos teniendo en cuenta la orientación de la muesca (ranura)
El hecho de que esté escuchando el sonido de un “bong” (que es el mismo que ocurre cuando se configura alguna opción o se cambia de juego) significa que XU3 está funcionando correctamente, de lo contrario no lo tendría en absoluto.
Cuarto mire la pantalla de dígitos LED en la MPU, ¿qué número muestra? Este le sirve de guía para buscar el código para resolver el misterio , el listado de códigos por lo general está en la puerta de cada máquina, si no está disponible , puede verlos en este enlace aquí MANUALES NXT
No está de más revisar el filtro de línea y las bombillas fluorescentes , al ser tan antigüas generan picos eléctricos que interfieren con el boot del inicio del programa al encenderse. Critical System error 13

Otros artículos del Autor: