Condensadores, capacitores llámense como se quiera siempre están presentes en la mayoría de los circuitos. Si hablamos de máquinas Tragamonedas es por seguro que los ha visto en las bobinas, circuitos de Hopper, filtros de línea , filtros de ruido en lámparas decorativas , mejor dicho en toda la máquina. Cuando se presenta un corto circuito, debemos reemplazarlos por el mismo valor
Hoy hablaremos de como leer el valor de los capacitores (o condensadores) para circuitos impresos tradicionales (con perforaciones).
Aunque si el sistema descrito puede ser usado también con los componentes a montaje superficial, algunas indicaciones como por ejemplo la tolerancia y también la tensión de trabajo, en estos últimos no se encuentra escrita.
Existe una codificación precisa para indicar el valor de las resistencias, el famoso sistema de las bandas de color. Por el contrario, con los capacitores (o condensadores), los fabricantes usan distintos métodos creando a veces un poco de confusión.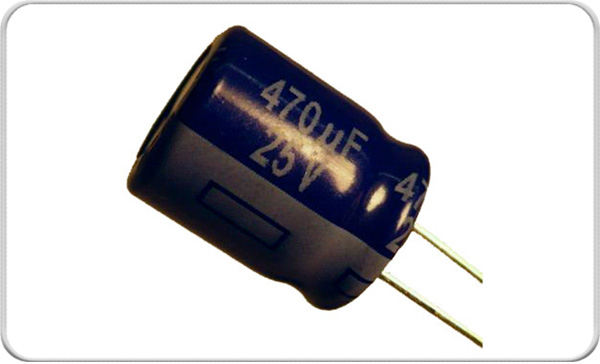
Foto de un capacitor electrolítico en el que podemos observar claramente el valor de capacidad y la tensión máxima de trabajo
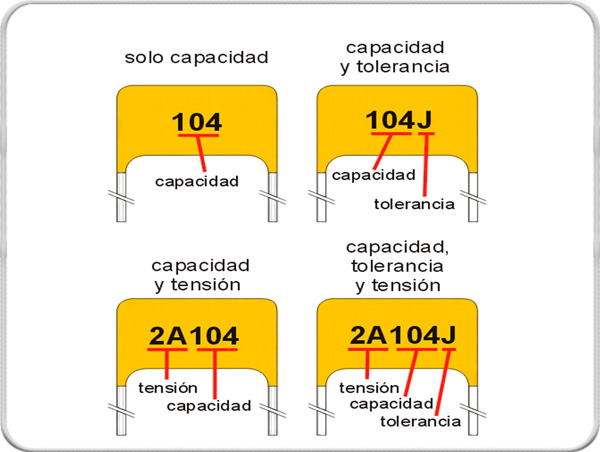
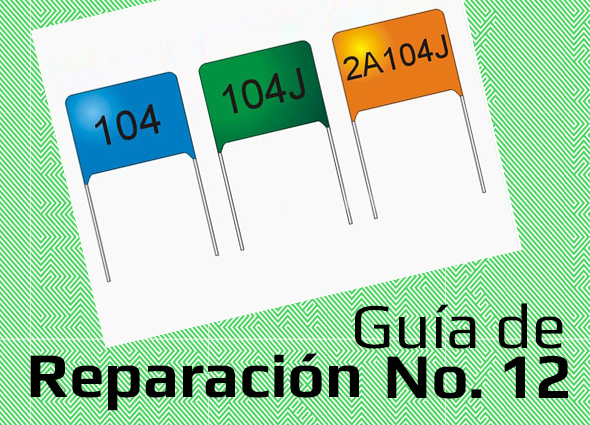
Generalmente se usa una codificación que consiste en un numero de tres dígitos seguido por una letra.

Capacitores poliéster para alta tensión
Antes que los puristas se lamenten, aclaro que la abreviación correcta del microfarad es el símbolo griego micro (µ) seguido por la letra F mayúscula. Debido a que generalmente cuando uno escribe un texto, no tiene a disposición los símbolos griegos en el teclado o también para evitar que en los distintos pasajes y codificaciones con distintos sets de caracteres a través de internet, este símbolo no sea transcrito erróneamente se tiende a reemplazarlo por la letra minúscula "u" aunque si no debemos olvidar que estamos hablando siempre de la letra " µ " (micro). Otro caso de este tipo es el símbolo Ω (ohm) que a veces se reemplaza con la letra "E" o, frecuentemente, no se escribe.
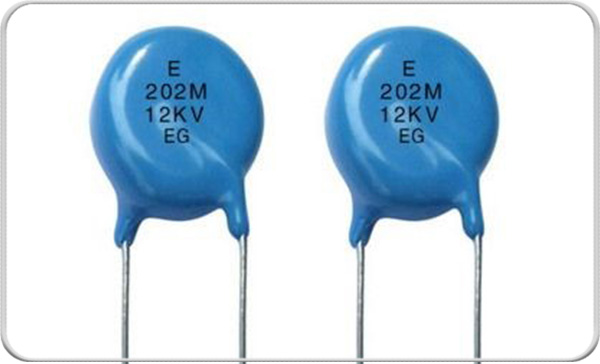
Capacitores para altísima tensión (12.000V) de 2nF
Como se dijo al inicio, a excepción de los capacitores electrólitos que generalmente superan ampliamente el valor de 1 microfarad, el universo de los capacitores usados en electrónica está compuesto por capacitores con valores que van desde pocos picofarad o pF (capacitores cerámicos o disco que parecen lentejas) hasta los cercanos a 1 microfarad o 1 µF (poliester multiestrato).
El motivo por el cual los padres de la electricidad y de la electrónica nos han complicado así la vida creando una unidad tan grande (el farad) que nos obliga a trabajar con semejantes submúltiplos.
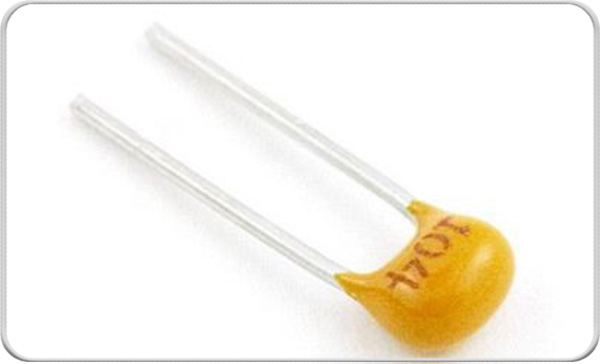
Típico capacitor de 100nF
Recordarse esta relación es importante porque con valores relativamente grandes de capacitores, por ejemplo uno de 1 uF, hablar de él en una descripción como "el capacitor de 1 millon de pF" es medio incomodo y lo mismo vale para un capacitor de 18pF (usado normalmente en los generadores de clock de los microcontroladores) si para indicarlo usáramos el valor 0,000018 uF, (algo bastante ilegible). Por lo tanto, aconsejo a los iniciados en electrónica de recordarse bien la conversión "al vuelo" entre los tres múltiplos (micro, nano y pico).
Ejemplos de valores típicos
Volviendo al sistema de codificación para capacitores entre 1pF y 1uF (la casi totalidad de los capacitores a excepción de los electrolíticos), decíamos que el valore se encuentra indicado con un número de tres dígitos seguido por una letra.
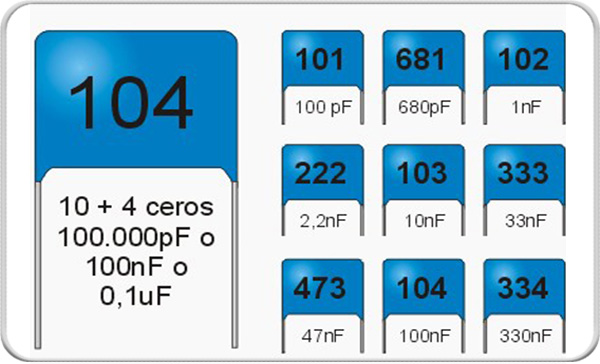
Por ejemplo: una capacitor con el número "472" es de 47 + 2 ceros, o sea 4700 pF (picofarad). Debido a que hemos superado los 1000 picofarad podemos "pasar" de submúltiplo y entonces podemos decir que nuestro capacitor es de 4,7nF. En este caso no nos conviene usar la unidad micro porque el valor no sería fácil de leer (0,0047uF). Con valores más grandes, como por ejemplo los usadísimos capacitores de filtro con el número 104, es decir, 10 + 4 ceros = 100.000 pF o también 100nF, es común que los proyectistas de circuitos usen la indicación
0,1 uF o .1uF (punto uno uF).

Capacitor de 100nF, +/-5% de tolerancia y 100V de tensión máxima de trabajo
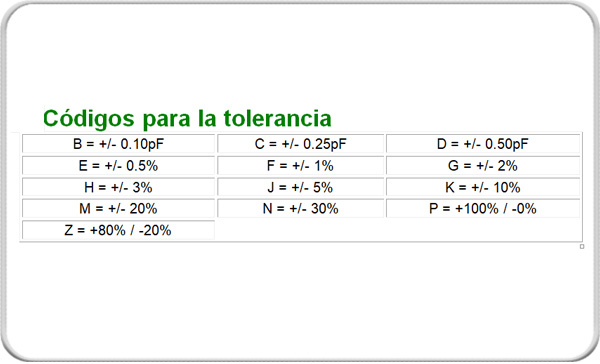
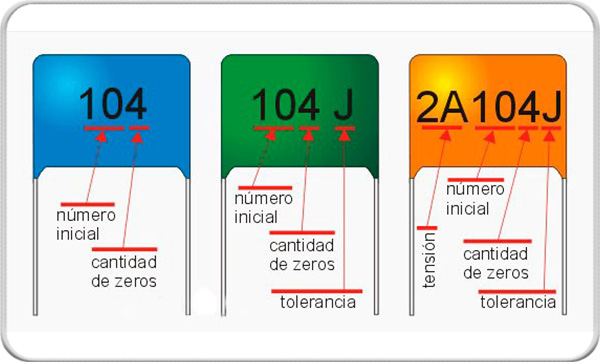
Ahora hablemos de la letra que se encuentra al final del número de tres dígitos. Es simplemente la tolerancia del componente, es decir, cuanto puede ser diverso el valor real respecto al valor indicado.
Confieso que, por mucho tiempo no tenía la menor idea de su función y lo he descubierto después de muchos años de electrónica. Probablemente porque trabajando "normalmente" es un parámetro no muy importante.
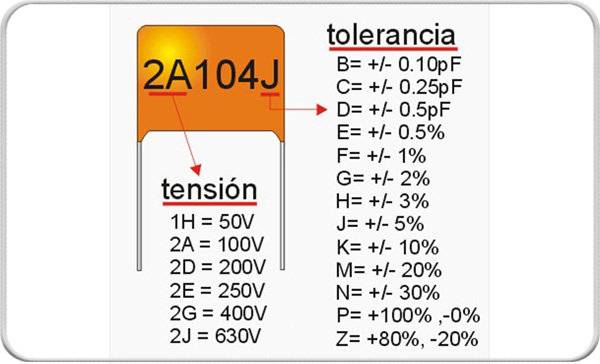
En la figura siguiente podemos observar cada letra a que tolerancia corresponde. Es interesante observar el hecho que algunas letras corresponden a "tolerancias asimétricas" como por ejemplo la "P", es decir, el componente puede tener una mayor capacidad respecto a la indicada pero no una menor. Este tipo de tolerancia es usada con los capacitores de "filtro" donde un posible valor mayor de lo indicado no perjudica mínimamente el funcionamiento del circuito.
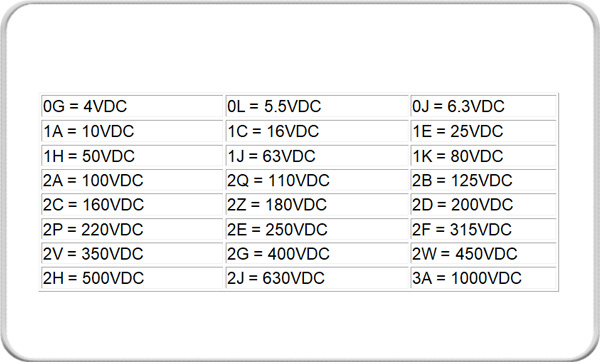
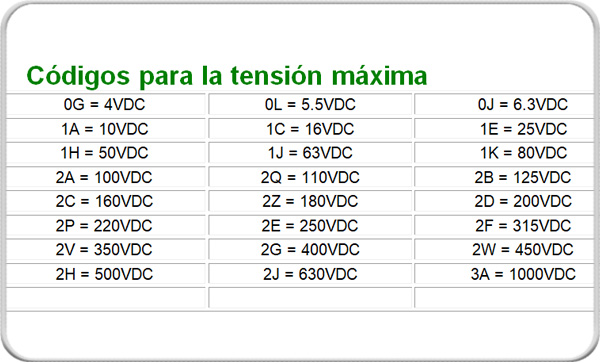
AQUÍ las Tablas de tolerancia y de tensión máxima de trabajo
Por último nos falta una información que en ciertos casos podría sernos útiles y que es la tensión máxima que el capacitor puede soportar sin que se rompa. Como sabemos, un capacitor está compuesto por una serie de placas metálicas aisladas entre si. Este material aislante es muy sutil, especialmente en el caso de capacitores de valores grandes.
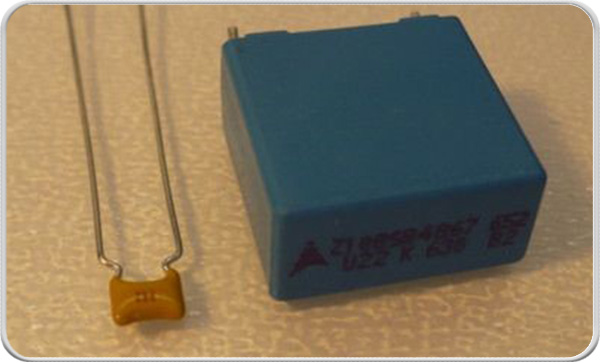
Dimensiones de dos capacitores de 220nF, el de la izquierda de 50V mientras que el de la derecha de 630V
Un ejemplo clásico de lo dicho son los capacitores usados para encender leds con 110V o 220V. Estos tiene que trabajar con tensiones elevadas y por lo tanto son mucho más voluminosos que los capacitores de los mismos valores de capacidad pero con tensión de aislamiento eléctrico más baja como podemos observar en la fotografía.
Muchas veces, la tensión máxima de trabajo la podemos encontrar escrita claramente, especialmente en los capacitores proyectados para trabajar con tensiones elevadas como podemos ver aquí, en algunas fotografías de este artículo. Otra veces, el valor de tensión directamente no se indica. Sucede a menudo con los capacitores usados en circuitos de baja tensión. Estos capacitores soportan tensiones entre 50V y 100V, bastante por encima de las típicas tensiones de trabajo de 12V/18V.
Por último, y no menos importante, existe una codificación numérica que usan algunos fabricantes y que consiste en un número seguido por una letra. En el diseño en el cual se encuentra la tabla de las tolerancias, podemos ver también la tabla de las tensiones máximas de trabajo.
Como todo lo relacionado con la tecnología, nada es absoluto y por lo tanto, siempre aparece un productor de componentes "fuera de los estándares" que usa sistemas de indicación de los valores distintos a los que hemos descrito.
De cualquiera manera, en líneas generales la descripción de este artículo, se adapta bastante bien (a veces con pequeñas variaciones) a la mayor parte de los capacitores en comercio.