














Los televisores y monitores LED son lo mismo que los televisores LCD y monitores.
Ambos tipos emplean la misma tecnología de visualización para crear las imágenes reales (los "cristales líquidos" reales y, en un sentido muy real, ambos tipos de pantallas son en realidad "LCD"). Solo la retroiluminación es diferente.
Aquí dos convertidores de voltaje para LCD
Los LED usan voltaje de CC para funcionar. A diferencia de los LED normales, los LED de alta potencia que se utilizan en la retroiluminación de televisión funcionan a un voltaje algo mayor, alrededor de 3 VDC por LED.

Aquí un convertidor de voltaje para LED
La corriente puede aumentar en un LED si operamos los LED forzando un voltaje más alto que el voltaje directo necesario o por otros factores.
Mucha gente preguntará por qué un LED no funcionará solo con una fuente de alimentación de CC normal
Por ejemplo, si un LED necesita 3 VDC, ¿por qué no funciona con una fuente de alimentación de 3 V CC?
¿Por qué los LED son impulsados por una placa de manejo sofisticada?
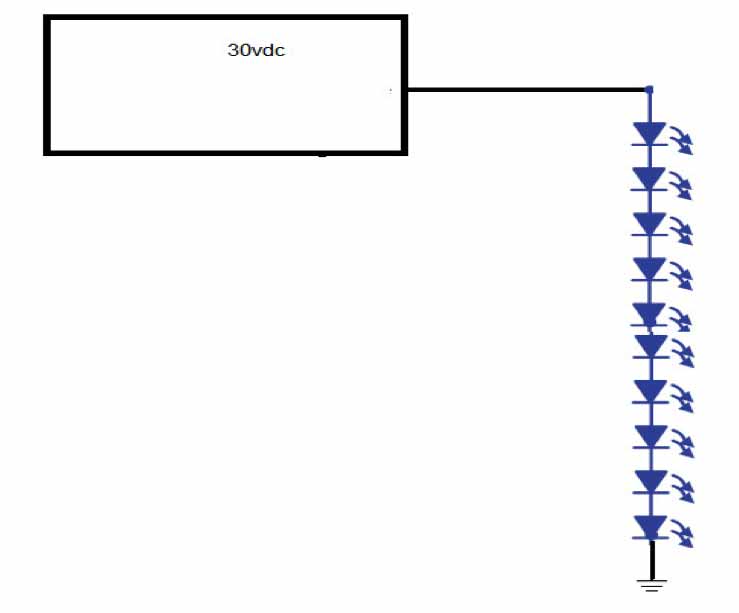
Examinemos estos tres circuitos y veamos por qué solo el último funcionará y por qué los primeros dos circuitos no funcionarán muy bien en la conducción de los LED.
En el primer circuito (figura 1), 10 LED se conducen en serie con una potencia de 30 V CC a través de un LED, la corriente alta pasará a través de él y eventualmente fallará.
En este segundo circuito, se ha conectado una resistencia en la secuencia de diodos en serie. Una resistencia asegurará que no importa cómo el voltaje sea alto a través de la cuerda del diodo, cada diodo solo funcionará a su voltaje directo deseado porque el exceso de voltaje caerá a través de la resistencia.
Aún así, la corriente no puede mantenerse constante con este método. Cuando la temperatura aumenta, cada diodo caerá mucho más bajo voltaje de caída hacia adelante y habrá un exceso de voltaje alto a través de la resistencia.
Ahora la corriente en la cuerda es claramente la misma que la corriente en la resistencia que ahora será alta debido al hecho de que el voltaje a través de ella es demasiado alto.
En este circuito, cada LED consume 3 voltios. Si la temperatura aumenta, cada LED consumirá, por ejemplo, 2.8 VDC. 2.8 * 5 = 14 VDC.
Toda la cadena consumirá 14 VDC y un voltio caerá sobre la resistencia. El controlador detecta esta caída de un voltio y reajusta su voltaje de salida para que la corriente que pasa a través de esta resistencia y toda la cadena de diodos permanezca fija tal como lo establece el diseñador.
En el primer circuito, la regulación de voltaje a través del diodo no estaba bien y, por lo tanto, la regulación de corriente tampoco está bien.
En el segundo circuito, la regulación de voltaje a través del diodo era buena, pero la regulación actual no era buena.
Solo en el tercer circuito es donde el voltaje y la corriente a través de los diodos fueron muy buenos.
Una cosa más que me olvido mencionar es por qué esta junta se llamó un impulso. Se llama así porque produce un voltaje mucho más alto que su voltaje de entrada y puede fácilmente tomar de 30 a 50 VDC y poner algo en el rango de 100 a 170 VDC para impulsar una gran cantidad de LED.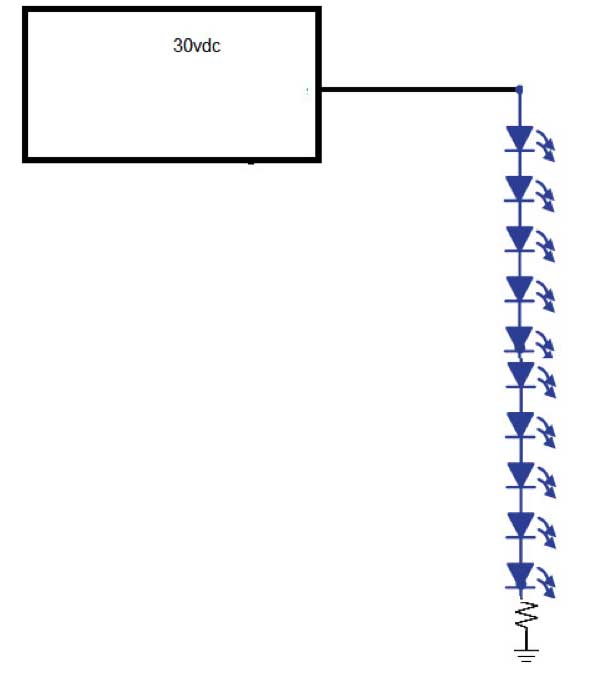
Solución de problemas de SMPS con un chip que tiene función de reinicio automático.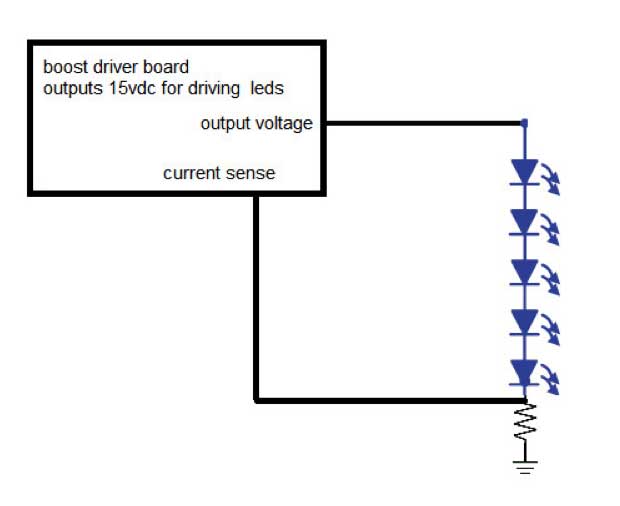
El apagado debido a OVP (protección contra sobre voltaje) OCP (protección contra sobre corriente) en uc3842 IC no afectará la lectura de Vcc.
Si pones tu sonda (multímetro o como lo llame) en el Vcc, no encontrarás ningún cambio cuando se produzca el apagado.
En un chip con una función de inicio automático, es diferente. El chip se apaga arrastrando Vcc a tierra. Esto es cierto para el apagado por sobretensión en todos los circuitos integrados que tienen la función de reinicio automático que se realiza descargando un condensador en el pin Vcc.
Una vez que el condensador se haya descargado, el IC lo cargará nuevamente. Si la condición de sobretensión persiste, el IC descargará la tapa y desactivará la salida nuevamente.
Esto es importante para que el supertecknic@ lo sepa. Si pones tu medidor en Vcc de un IC que tiene una función de reinicio automático y lo encuentras saltando como loco, sabes que tienes alguna falla, pero probablemente fuera del "reino de la potencia IC".
El caso de reparación en el que aprendí esto fue cuando fijé un SMPS que tenía un cortocircuito pesado en el circuito primario. Yo había reemplazado todos los componentes en corto / malo.
De todos modos, reemplacé todos esos componentes y, sin embargo, la fuente de alimentación se negó a funcionar.
Cuando probé el pin Vcc, descubrí que estaba saltando como loco de 0 a 5 a 11 y volvía a cero. Fue una acción tan rápida que estaba usando mi función (min-max) en mi casualidad para detectarlo.
Después de leer la hoja de datos, estaba seguro de que estaba relacionada con la retroalimentación, ya que Vcc está pulsando y dado que su acción es una indicación de cierre de OVP.
Cuando la retroalimentación es baja o falta, el chip pwm aumenta el ancho del pulso, lo que aumenta la tensión de salida a niveles peligrosos. Gracias a los astutos diseñadores de chips, el IC tiene otro ojo sobre el secundario que es el pin Vcc (ya conoces la historia auxiliar del devanado, ¿no?). Una vez que el pin de Vcc detecta este aumento de voltaje, desencadena el apagado de OVP.
Por desesperación, traté de probar los últimos componentes que no había probado (o los probé en un circuito que no es suficiente). Probé el acoplador óptico (optoaislador) y obtuve una sorpresa. El lado del transistor del acoplador óptico fue corto en Simi. Sé que es extraño, pero eso es lo que realmente sucedió.
Entre los terminales del colector y del emisor estaba leyendo algo en el rango de 20 kilo ohmios. Reemplazar ese acoplador solucionó el problema de falta de energía y devolvió la fuente de alimentación a la vida.
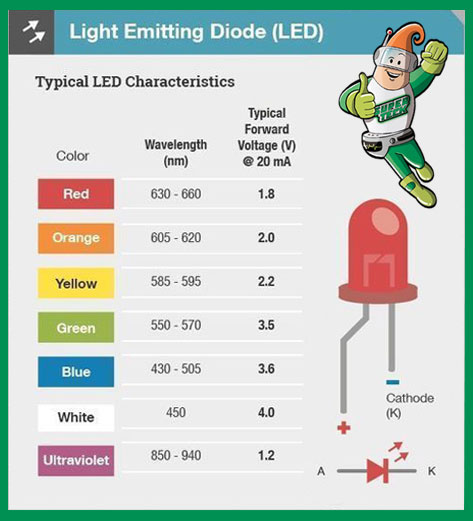
Voltajes de LED´s para diferentes colores, recuerde que aquí encontrará las calculadoras